
Zum Blogbeitrag MQTT-Regensensor Modul
Allgemeines:
Im Internet wird eine Vielzahl von verschiedenen Regensensoren angeboten. Die meisten davon kommen aus Fernost und arbeiten nach dem Resistance Prinzip.

Trifft ein Regentropfen auf die nicht isolierten Kontakte des Sensors, werden die nebeneinanderliegenden kammförmigen Kontakte durch den Regen verbunden, was letztendlich zu einer Reduzierung des Sensorwiderstandes führt.
Diese Widerstandsänderung ist abhängig vom Verschmutzungsgrad des Regenwassers, sowie der bereits eingetretenen Oxidation des Regensensors.
Über eine Komparator Schaltung kann hierbei meist der Schaltpegel eingestellt werden, bei dem Regen detektiert wird und der dann ein digitales Ausgangssignal setzt.
Manche Sensoren stellen zusätzlich zu diesem Digitalausgang noch ein Analogsignal zur Verfügung, was eine Lösung für eine zeitweilige Kalibrierung des Sensors durch die Software erlauben würde.
Das große Problem bei dieser Messmethode ist es, dass selbst bei Sensoren mit vergoldeten Kontaktoberflächen immer parasitäre Ströme fließen.
Da praktisch immer ein kleiner Gleichstrom an beiden Polen des Sensors anliegt, führt dies unabhängig von der Qualität des Sensors zu einem elektrochemischen Prozess und damit über kurz oder lang zu einer schrittweisen Zerstörung des Sensors.
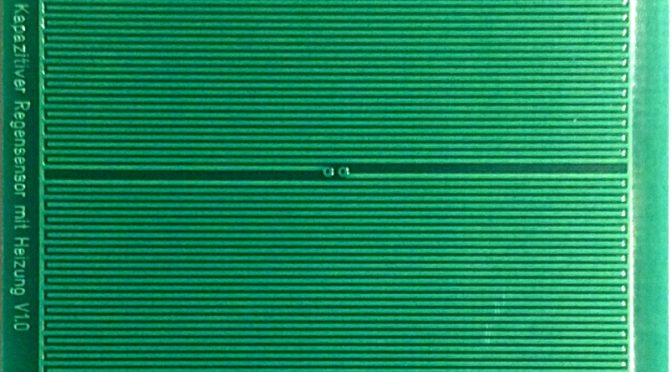
Eine bessere Lösung stellt dieser Sensor dar, da er auf einem anderen Prinzip, dem kapazitiven Prinzip beruht.
Das Funktionsprinzip bei einem kapazitiven Sensor ist dem oben vorgestellten Messverfahren durchaus ähnlich. Es unterscheitet sich jedoch in einem wesentlichen Punkt, bei Regen wird hier keine leitende Verbindung hergestellt. Durch die Wassertropfen auf der Oberfläche wird lediglich die Kapazität des Sensors verändert, das Wasser wirkt als Dielektrikum.
Der Vorteil bei diesem Lösungsansatz liegt darin, dass keine blanken Leiterbahnoberflächen der Witterung ausgesetzt sind und dadurch auch kein elektrochemischer Prozess ausgelöst wird, der den Sensor auf Dauer irreversibel beschädigt. Alle leitenden Teile sind durch eine Lackschutzschicht vor Witterungseinflüssen geschützt.
Die Kapazität des Sensors beträgt im trockenen Zustand ca. 170pF. Tritt eine Betauung ein oder trifft Regen auf den Sensor, steigt die Kapazität an. Durch das ermittelte Delta C, lässt sich sogar eine Aussage über die Art des Regens und dessen Intensität treffen. Ist es Neblig oder es handelt sich um einen feinen Nieselregen, der die Sensoroberfläche benetzt, bilden sich viele kleine Wasser Tröpfchen auf dem Sensor, was wiederrum zu einem großen Delta C führt.
Bei einem Durchschnittlichen Regen Ereignis sind es vorwiegend größere Tropfen, die zu einem großen Teil sofort wieder abrutschen, so ergibt sich ein kleineres Delta C.
Um schnell festzustellen zu können, ob der Regen zu Ende ist, besitzt der Sensor eine Heizung an der Platinen Unterseite. Diese besteht aus zwanzig 15 Ohm Heizwiderstände, die es bei einer Versorgungsspannung von 5V immerhin auf eine Heizleistung von knapp 1,8 W bringen.
Sie sorgen für eine zügiges verdunsten der Flüssigkeit bzw. einer Eisbildung auf der Sensoroberfläche.
Durch die sehr kleine Bauform des Sensors, kann selbst mit dieser relativ geringen Leistung ein schnelles (ca. 5 Minütiges) Abtrocknen sichergestellt werden.
Energetisch gesehen ist es sinnvoll, die Sensorheizung nur für die Dauer einer Regenerkennung zu betreiben. Das bedeutet, wird keine Feuchtigkeit oder Regen mehr detektiert, soll die Sensorheizung abgeschaltet werden!
Hierfür ist ein Transistor auf der Sensorplatine vorgesehen.
Wird hier ein Mosfet bestückt und ist der Pin in dieser Hardware Version 1.00 für dessen Ansteuerung nicht angeschlossen, muss dieser auf Masse gelegt werden.
Da der Mosfet bei einem offenem Gate in einem Halbleitenden Zustand gehen könnte, was zur einer Zerstörung des Bauteils führen würde.
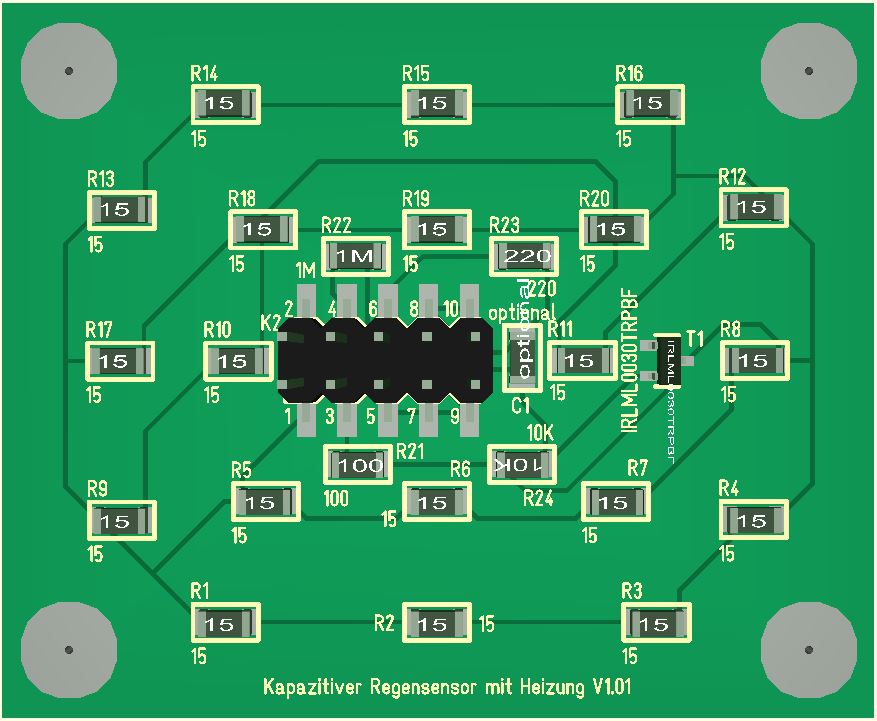
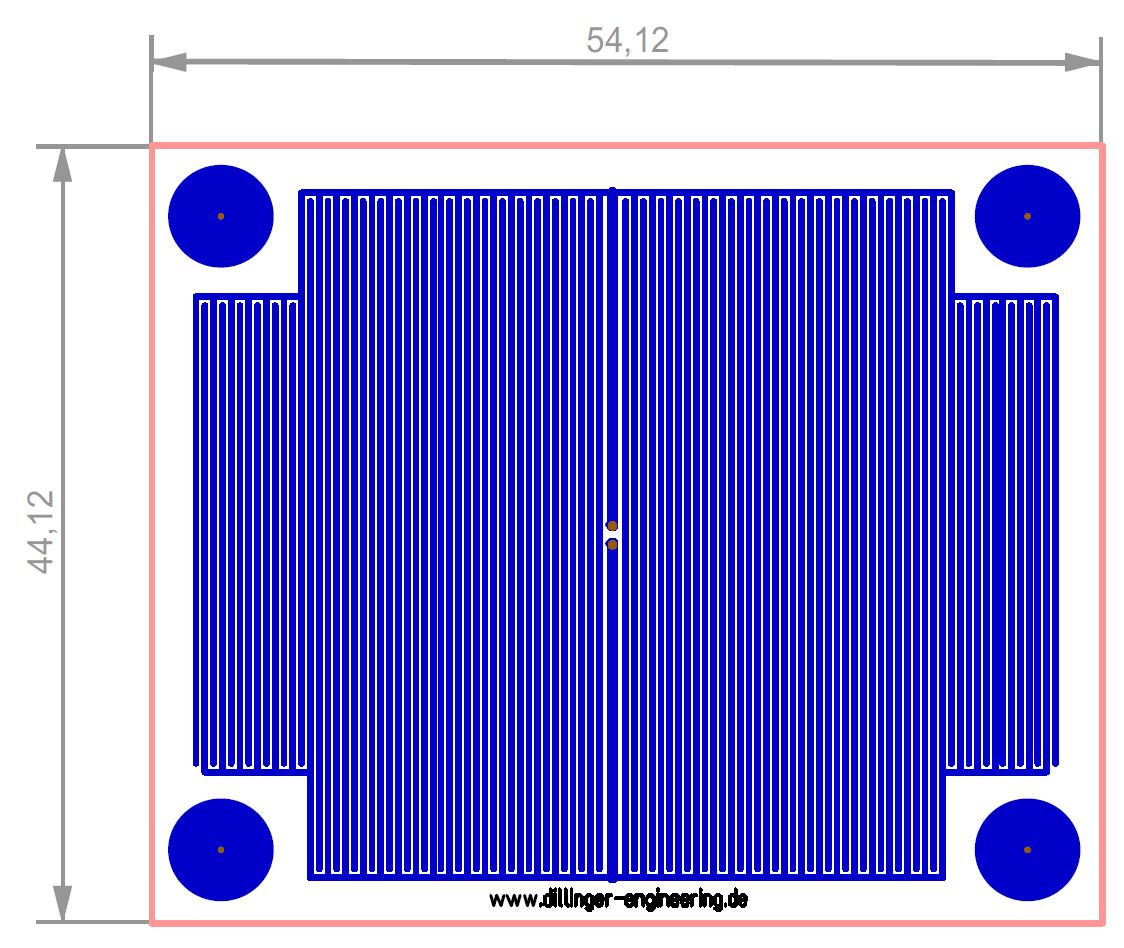
Diese Bild zeigt die Bestückung der Unterseite des Sensors. Es ist gut zu erkennen, das im Layout zwar Pats für eine Befestigung der Sensorplatine vorgesehen sind, diese jedoch keine Bohrung besitzen. Weshalb hier auch kurz auf die Befestigung des Sensors eingegangen werden soll.
Wie zu sehen ist befinden sich die Anschlüsse annähernd mittig auf der Sensorplatine.
Verwandt man z.B. eine feste wasserdichte Hensel Anschlussdose um die Elektronik darin zu verstauen, genügt es in den Deckel ein passendes rundes Loch zu bohren, damit die Anschlüsse nach innen geleitet werden können. Der Regensensor selbst wird am besten mit Silikon wasserdicht mit dem Deckel verklebt.
Sollten dennoch Befestigungslöcher benötigt werden, so können diese nachträglich ausgebohrt werden.
Es bietet sich an die Platine für die Auswertung mit dem entsprechenden Gegenstück auszustatten, so dass diese von der Innenseite aufgesteckt werden kann.
Die Befestigung dieser Platine kann mit Distanzbolzen, die am Deckel eingeschraubt werden, erfolgen. Werden die Schrauben nicht vom Sensor (mit Silikon) überdeckt, sollte hier auf Edelstahlschrauben zurückgegriffen werden.
Im Unteren Bild ist der Schaltplan der Sensorplatine zu sehen.
Bei der Steckverbindung wurde wert daraufgelegt, dass die Signale für alle möglichen Anschlussvarianten an den Pins herausgeführt wurden.
Somit stehen dem Endanwender auch alle möglichen Messverfahren zur Verfügung, die zur Kapazitätsmessung angewandt werden können.

Pin Belegung:
- VDD +5V / 3,3V
- NC
- Sensorheizung
- Ladewiderstand
- Analog wert (Ladezustand)
- Entladewiderstand
- GND
- GND
Kapazitätsmessung durch Laden- und Samplen der Kondensatorspannung
Die Platine des kapazitiven Regensensors wurde für verschieden Anwendungsbereiche entwickelt, deshalb gibt es auch verschieden Bestückungsvarianten.
Wenn man z.B. einen PIC Mikrokontroller mit einem Komperatoreingang verwnden, kann eine Messmethode angewendet werden, bei die Kapazität des Sensor über den Pin 6, R23 entladen wird (Pin auf LOW) und der Pin anschließend wieder als Komperator Eingang umgeschaltet wird.
Der Pin 4, der zu diesem Zeipunkt im Tristate (hochohmig) war, wird nun als Ausgang programmiert und auf LOW geschaltet. Dieser läd nun die die Kapazität des Regensensors über R22 auf, bis der Komperatoreingang kippt.
Die ermittelte Zeit dient dann als Grundlage für die Kapazitätsbestimmung.
Beim MQTT-Regensensormodul wird ein anderes Messvervahren angewannt, da dieser nicht über einen Komperatoreingang verfügt.
Hier wird der AOUT (der gegen GND direkt die Kapazität des Sensors dartellt) als Kapazität eines Multivibrators genutzt, der abhängig von dieser Kapazität seine Ausgangsfrequenz ändert. Diese Ausgangsfrequenz wird an einem digitalen Eingang des ESP8266 gemessen und die Sensorkapazität aus der Frequenz berrechnet.
Da für dieses Messverfahren der C1, R22 und R23 nicht benötigt werden, müssen diese Bauteile bei diesem Messverfahren nicht mit bestückt werden.
Das obengenannte Messverfahren, dass sich jedoch nur für größere Kapazitäten im Bereich zwischen 10 nF und 2000 uF eigent, beschreibt der folgende Source Code von von Matthias Busse
Quellenverweis :
Kapazitäten von 10nF bis 2000uF einfach messen mit dem Arduino
// Kapazität Messgerät 10nF bis 2000uF
//
// Matthias Busse 22.2.2015 Version 1.1
#define messPin 0 // Analog Messeingang
#define ladePin 13 // Kondensator lade Pin über einen 10kOhm Widerstand
#define entladePin 11 // Kondensator entlade Pin über einen 220 Ohm Widerstand
#define widerstand 9953.0F // 10 kOhm > gemessen 9,953 kOhm
unsigned long startZeit;
unsigned long vergangeneZeit;
float microFarad;
float nanoFarad;
void setup() {
pinMode(ladePin, OUTPUT); // ladePin als Ausgang
digitalWrite(ladePin, LOW);
Serial.begin(9600); // Serielle Ausgabe
Serial.println("Kapazitaetsmesser Version 1.1");
}
void loop() {
// Kondensator laden
digitalWrite(ladePin, HIGH); // ladePin auf 5V, das Laden beginnt
startZeit = micros(); // Startzeit merken
while(analogRead(messPin) < 648){} // 647 ist 63.2% von 1023 (5V)
vergangeneZeit= micros() - startZeit - 114; // 0-Messung abziehen (112-116 us)
if(vergangeneZeit > 4294960000) vergangeneZeit = 0; // Minuswerte auf 0 setzen (ist long deshalb der hohe Wert)
// Umrechnung: us zu Sekunden ( 10^-6 ) und Farad zu mikroFarad ( 10^6 ), netto 1
microFarad = ((float)vergangeneZeit / widerstand);
Serial.print(vergangeneZeit); // Zeit ausgeben
Serial.print(" nS ");
if (microFarad > 1){
if(microFarad < 100) {
Serial.print(microFarad,2); // uF.x ausgeben
Serial.println(" uF ");
}
else {
Serial.print((long)microFarad); // uF ausgeben
Serial.println(" uF ");
}
}
else {
nanoFarad = microFarad * 1000.0; // in nF umrechnen
if(nanoFarad > 10) {
Serial.print((long)nanoFarad); // nF ausgeben
Serial.println(" nF ");
}
else
Serial.println("kleiner 10 nF");
}
/* Kondensator entladen */
digitalWrite(ladePin, LOW); // ladePin auf 0V
pinMode(entladePin, OUTPUT); // entladePin wird Ausgang
digitalWrite(entladePin, LOW); // entladePin auf 0V
while(analogRead(messPin) > 0){} // bis der Kondensator entladen ist (0V)
pinMode(entladePin, INPUT); // entladePin wird Eingang
while((micros() - startZeit) < 500000){} // bis 500ms warten, d.h. max 2 Ausgaben pro Sekunde
}
Kapazitätsmessung sehr kleiner Kapazitäten
Da bei sehr kleien Kapazitäten die Ladezeit des Kondensators ebenfalls sehr klein wird, müsste beim oben vorgestellten Messverfahren der Ladewiederstand im Verhältnis hierzu entsprechend vergrößert werden, um mit der Samplingrate des AD-Wandlers im Mikrokontroller immer noch ein akzeptables Messergebnis erzielen zu können.
Das Problem bei einem sehr großen Ladekondensator liegt darin, dass natürlich auch der analoge Eingang des Mikrokontrollers den Kondensator belastet und entläd. Der Messfehler wird also umso größer, je größer der Ladewiderstand wird, bis das System am Ende kippt und der Ladewiderstand die benötigte Ladung nicht mehr liefern kann.
Da sich die Kapazität des Regensensors in einem Bereich von 170pF – max. 400 pF bewegt, wird hier für auf eine anderes Messverfahren zurückgegriffen werden.
Das Frequenzmessverfahren
Bei diesem Messverfahren wird keine ADC benötigt, es kommt mit einem Digitaleingang des Mikrokontrollers aus.
Hierfür kommt der hochgenaue Langzeittimer NE555 zum Einsatz.
Dieser Timer seht sowohl in einer 5V Variante als NE555, als auch für Mikrokontroller die nicht 5V tolerant in einer 3V Variante ICM7555 zur Verfügung.
Arbeitet der Mikrokontroller mit 3,3,V und stehen nur ein NE555 zur Verfügung, kann natürlich auch ein Spannungsteiler am Ausgang den Levelshift übernehmen.
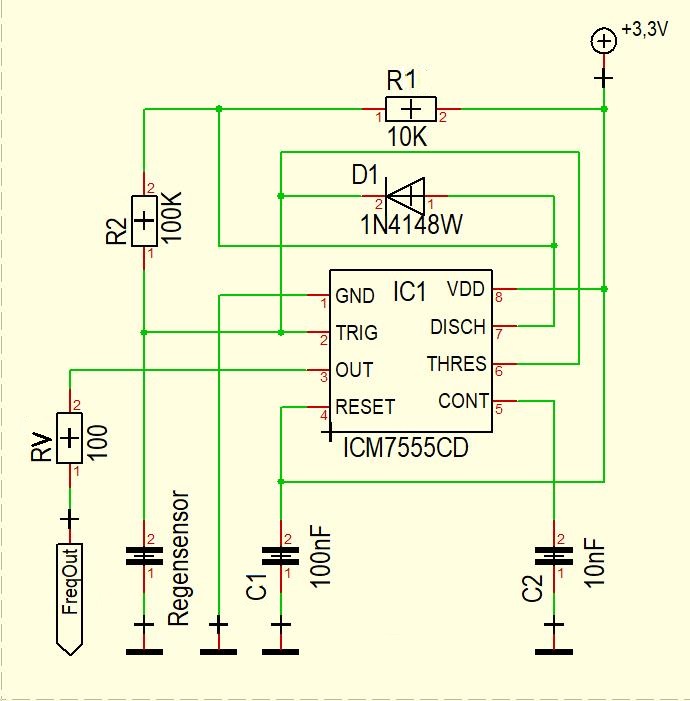
Der NE555 wird in dieser Schaltung als Multivibrator eingesetzt, der abhängig von angeschlossenen Kondensator seine Ausgangsfrequenz verändert.
Wenn am Ausgang gleiche Ein- und Ausschaltzeiten erzeugt werden sollen, muss die Standardschaltung (siehe oben) mit einer Diode parallel zum Widerstand R2 aufgebaut werden. Andernfalls kann diese Diode einfach entfallen. In der obigen Bauteilauslegung ist das Tastverhältnis annähernd 1:1 was auch hier die Diode unnötig macht.
Im Programm des Regensensors werden beide Varianten berücksichtigt. Da sowohl die Zeitdauer der negativen als auch der positive Halbwelle gemessen und anschließend addiert werden. Und damit die ganze Periodendauer berechnet wird.
Für die Messung wird vom Regensensor nur der Pin 5 (Analogwert) und Pin 7 (GND) benötigt.
Soll die Heizung genutzt werden kommen noch der Pin 1 (VDD) und Pin 3 (Sensorheizung aktivieren) hinzu.
Die Ein- Zeit berechnet sich wie folgt:
T1= 0,694 * (R1 + R2) * C
Die Aus- Zeit berechnet sich wie folgt:
T2= 0,694 * R2 * C
Die gesamte Periodendauer ist die Summe aus T1 +T2
T = 0,694 * C * (R1 +(2 * R2))
f = 1 / T
Die Frequenz ist 1 / T1 + T2, damit ergibt sich die Ausgangsfrequenz nach folgender Formel:
f = 1 / (0,694 * C * (R1 +2 * R2))
Da bei dieser Anwendung für uns nicht wichtig ist, welche Kapazität der Sensor hat, kann bereits die gemessene Frequenz für eine Regenauswertung verwendet werden.
Der Vollständigkeit halber hier trotzdem noch die kurz die nach C umgestellte Formel:
C =1 / ( f * 0,694 * (R1 + 2 * R2))
Programaufbau für die Kapazitätsmessung des Regensensors
/* Capacitivemeasurement (c) by Dillinger-Engineering 10/2020
Funktionsweise:
Um die kleinen Kapazitätsveränderungen des Regensensors (pF-Bereich)
mit einer hohen Genauigkeit zu messen, wird hier ein NE555/3V verwendet.
Dieser arbeitet als Multivibrator mit einer Frequenz im KHz Bereich.
Ändert sich die Messkapazität, ändert (sinkt) auch die
Frequenz. Je nach Auslegeung der Schaltung kann über die
Frequenzänderung dann die entsprechende Kapazität errechent werden.
Je gröer der Parameter "MeasuringCycleleTime" gewählt wird,
um so genauer wird auch die Messung. Zu beachten ist dabei jedoch,
dass sich, sollte ein Sensor Fehler (kein Signal vom Eingang) vorliegt, damit
auch die Timeoutzeit entsprechnde verlängert !
*/
const byte InputPin = 5; // Wemos D1 mini (Pin D1)
const unsigned int MeasuringCycleleTime = 1e6; // 1000000 us
const long R1 = 10000; // 10 KOhm
const long R2 = 100000; // 100 KOhm
float GetFrequeny(){ // Ergebnis in Hz
float fsum = 0.0;
unsigned int counts = 0;
double f, T;
unsigned long SartTtime = micros();
bool Fail = false;
do {
T = pulseIn(InputPin, HIGH, MeasuringCycleleTime) + pulseIn(InputPin, LOW, MeasuringCycleleTime);
if(T==0){
Fail = true;
}
f=1/T;
counts++;
fsum += f * 1e6;
} while(micros() < (SartTtime + MeasuringCycleleTime) && !Fail); // 1 Sekunde mitteln
if(Fail){
return(0);
}else{
f = fsum / counts * 0.9925; //Korrekturwert ermitteln und einrechnen
return(f);
}
}
float GetCapacity(){ // Ergebnis in pF
return(1/(GetFrequeny() * 0.694 * (R1 + 2 * R2))* 1e12);
}
void setup() {
pinMode(InputPin, INPUT);
Serial.begin(115200);
}
void loop() {
char CharStr[30];
// Show Data on Serial if available
sprintf(CharStr,"Capacity: %.3f pf", GetCapacity());
Serial.println(String(CharStr));
sprintf(CharStr,"Frequenz: %.3f Hz", GetFrequeny());
Serial.println(String(CharStr));
}
