Den aktuellen Source Code für dieses Projekt sowie das Einbaumodul der Hardware Version 2 findest du in meinem Web Shop.
Einleitung
Die Reolink® Door Bell ist ein robustes Kamerasystem für die Haustür und kann die vorhandene Türklingel ersetzen.
Hierfür bietet der Hersteller ein kleines Zusatzmodul das „Reolink® Chime“ an. Dieses Modul wird einfach an passender Stelle in die Steckdose gesteckt und mit dem lokalen WLAN verbunden. Die Einrichtung ist denkbar einfach und klappt in der Regel ohne Probleme.
Unschön war für mich, dass lediglich 10 Klingelmelodien ausgewählt werden können und keiner so richtig meinem Geschmack entsprach.
Außerdem hätte ich die Klingelevents gerne in meinem IO-Broker eingebunden, aber leider bietet die Reolink® Door Bell bisher keine MQTT Funktionalität.
Nach ein bisschen Recherche war schnell klar, dass man über eine entsprechende Konfiguration im Webinterface der Klingel, das Senden von WebHooks aktivieren kann.
So entstand die Idee, die von der Klingel gesendeten WebHooks mittels ESP8266 zu empfangen und auszuwerten um damit einen kleinen DF Player Mini mit eigenen Klingeltönen anzusteuern.
Zusätzlich sollten die Konfiguration des Moduls sowohl über eine Webinterface oder MQTT möglich sein.
Die von der Reolink® Door Bell gesendeten Events sollten dann natürlich auch in einem MQTT-Broker auflaufen und auswertbar sein. So entstand am Ende dieses Projekt, das alle Funktionalitäten der Anforderung erfüllt.

Technische Beschreibung zum Projekt Reolink® Doorbell DIY Chime
Dieser Beitrag stellt nun eine verbesserte Version der ©Reolink Door Bell Chime vor. Die über die WebHook Funktion der Reolink Door Bell angesteuert und eine Reihe eigener Klingelmelodien für die verschiedenen WebHook Ereignisse abspielen kann.
Als Plattform für die Auswertung der WebHook Ereignisse kann wahlweise eine WEMOS D1 mini oder ein WEMOS ESP32 D1 mini verwendet werden.
Der einzige Unterschied besteht darin, dass der WEMOS ESP32 D1 mini über mehr IO’s verfügt und somit zusätzlich eine externe (bestehende) Klingel über einen potentialfreien Relaiskontakt angesteuert werden kann. Die Platine wurde so erstellt, dass beide Module abhängig von der Anforderung oder der Verfügbarkeit verwendet werden können.
Die Wiedergabe der Klingeltöne übernimmt ein DF Player mini, der über eine Serielle Verbindung mit dem ESP verbunden ist. Die Klingeltöne und System Textansagen werden hierbei auf einer micro SD-Karte gespeichert die anschließend in den Player eingesteckt wird.
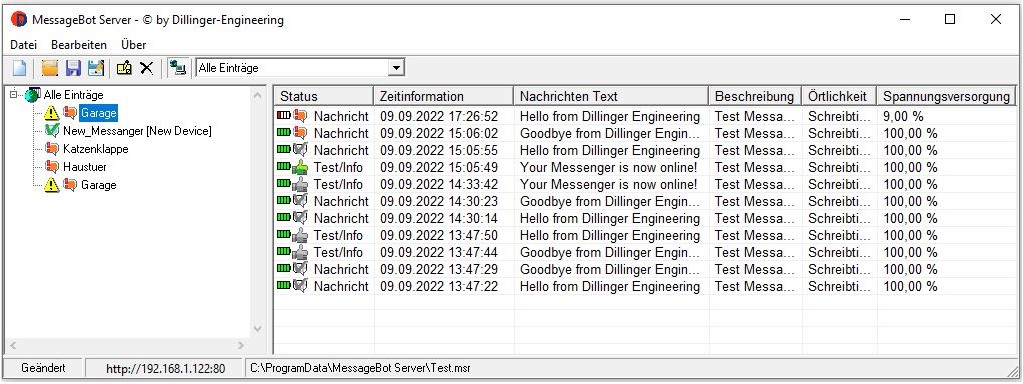
Für die Einbindung in das lokale WLAN und die Konfiguration stellt das Modul ein Landingportal und ein integriertes Webinterface zur Verfügung.
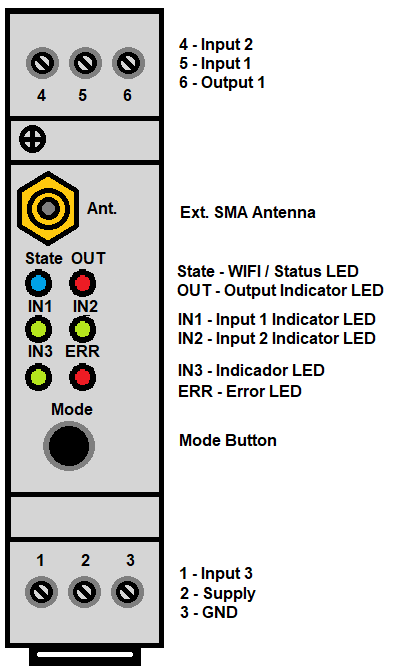
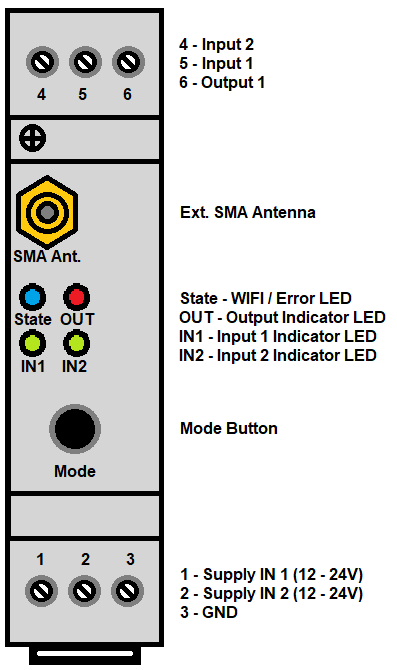
Das Modul besitzt unter anderem drei Bedientaster über die die Lautstärke eingestellt oder das Modul auf Werkseinstellungen zurückgesetzt werden kann. Auch die Suche nach einem neuen Firmware Update ist hierüber möglich.
Für eine schnelle Info der Betriebszustände wurden zusätzlich noch drei LED’s vorgesehen, die den Powerstatus, den Systemstatus und den WIFI Status anzeigen.
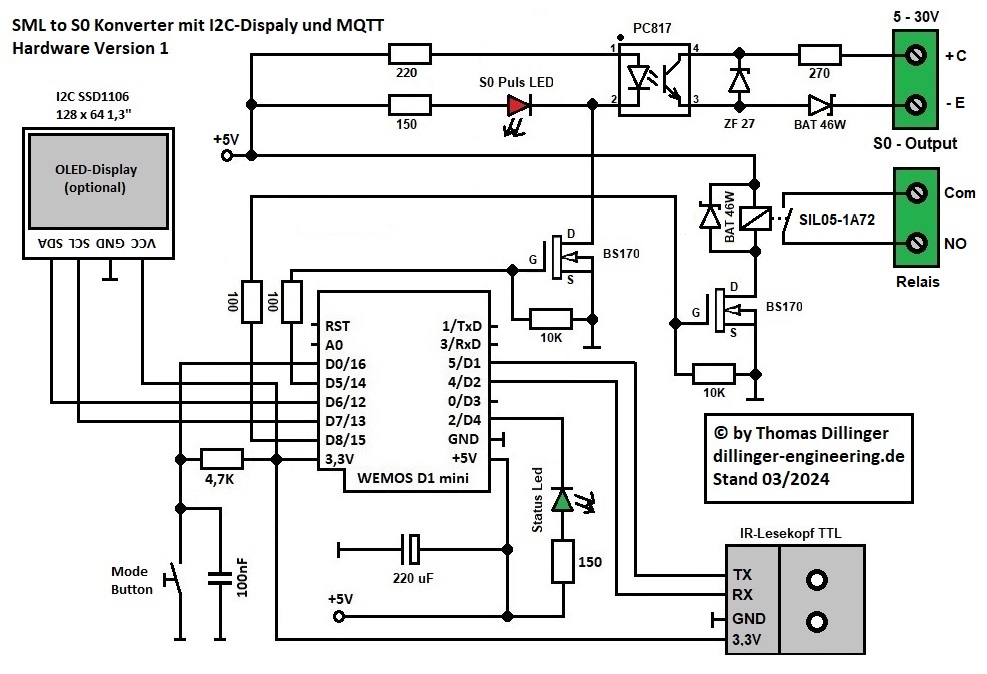
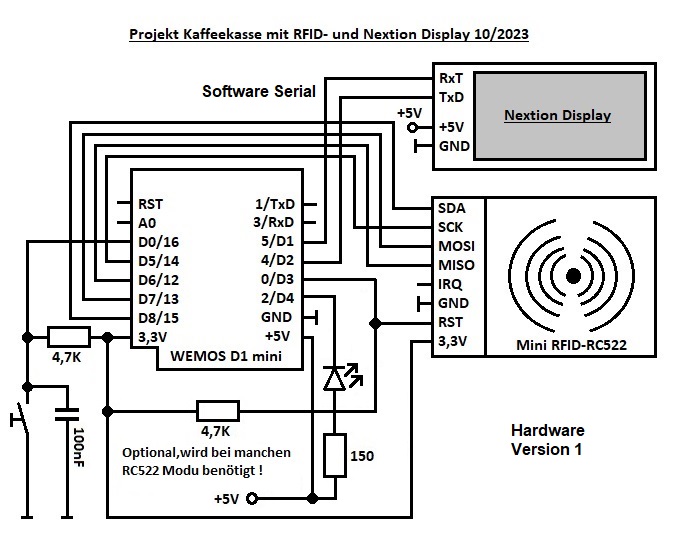
Der Aufbau der Schaltung gestaltet sich recht übersichtlich, da nur wenige Komponenten für den Aufbau notwendig sind. Er kann somit auch leicht auf eine Lochrasterplatine oder einem Breadboard erstellt werden.
Im folgenden Bild ist der Schaltplan der Hardware Version 1, Ref. 1 zu sehen.

Bilder und Informationen vom Prototyping und zum Webinteface
Hier ist ein erster Versuchsaufbau auf einer Lochrasterplatinen zu sehen. Die von mir in ein altes Powerline Steckergehäuse eingebaut wurde. Als Spannungsversorgung habe ich ein Netzteil der Firma Hi-Link (5V / 600mA) verwendet.

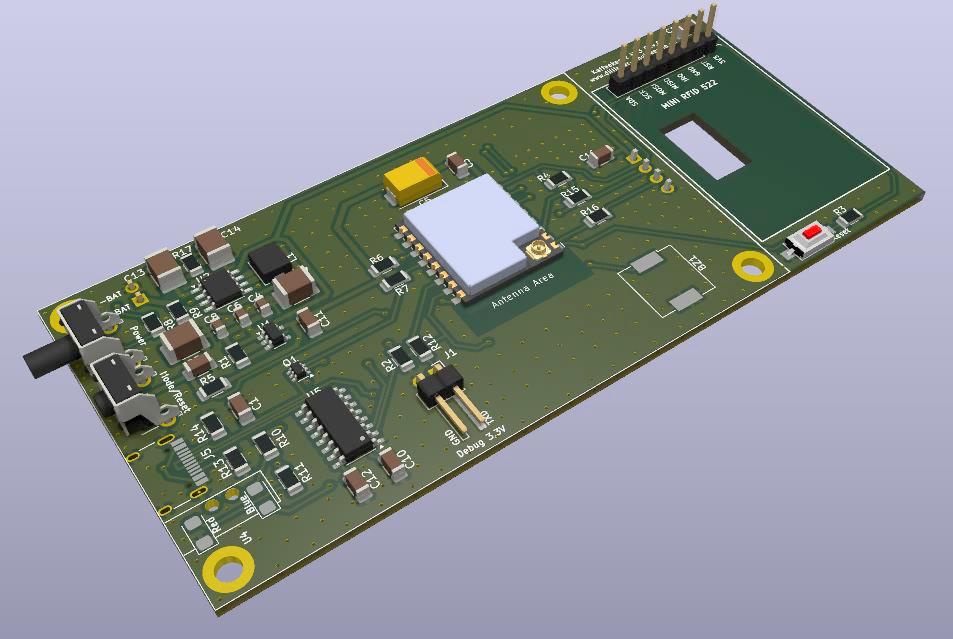
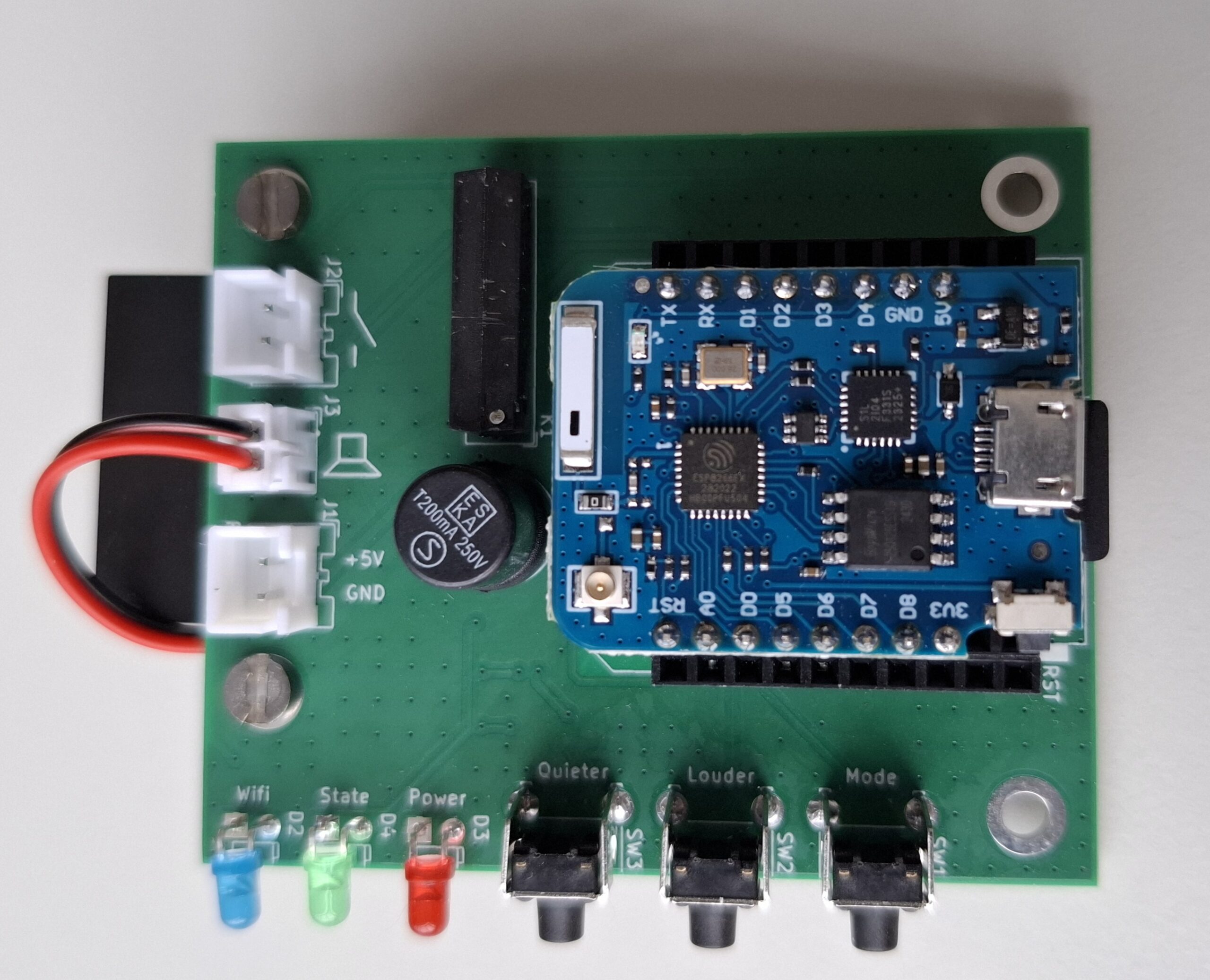
Nach dem alles zu meiner Zufriedenheit funktioniert hat, habe ich anhand des Testaufbaus eine kleine Platine mit Kicad erstellt.
Hier wurde bewusst auf ein Netzteil direkt auf der Platine verzichtet. Somit bleibt ist die Platinen Größe möglichst kompakt und die Auswahl der 5V Spannungsversorgung dem Endanwender überlassen.
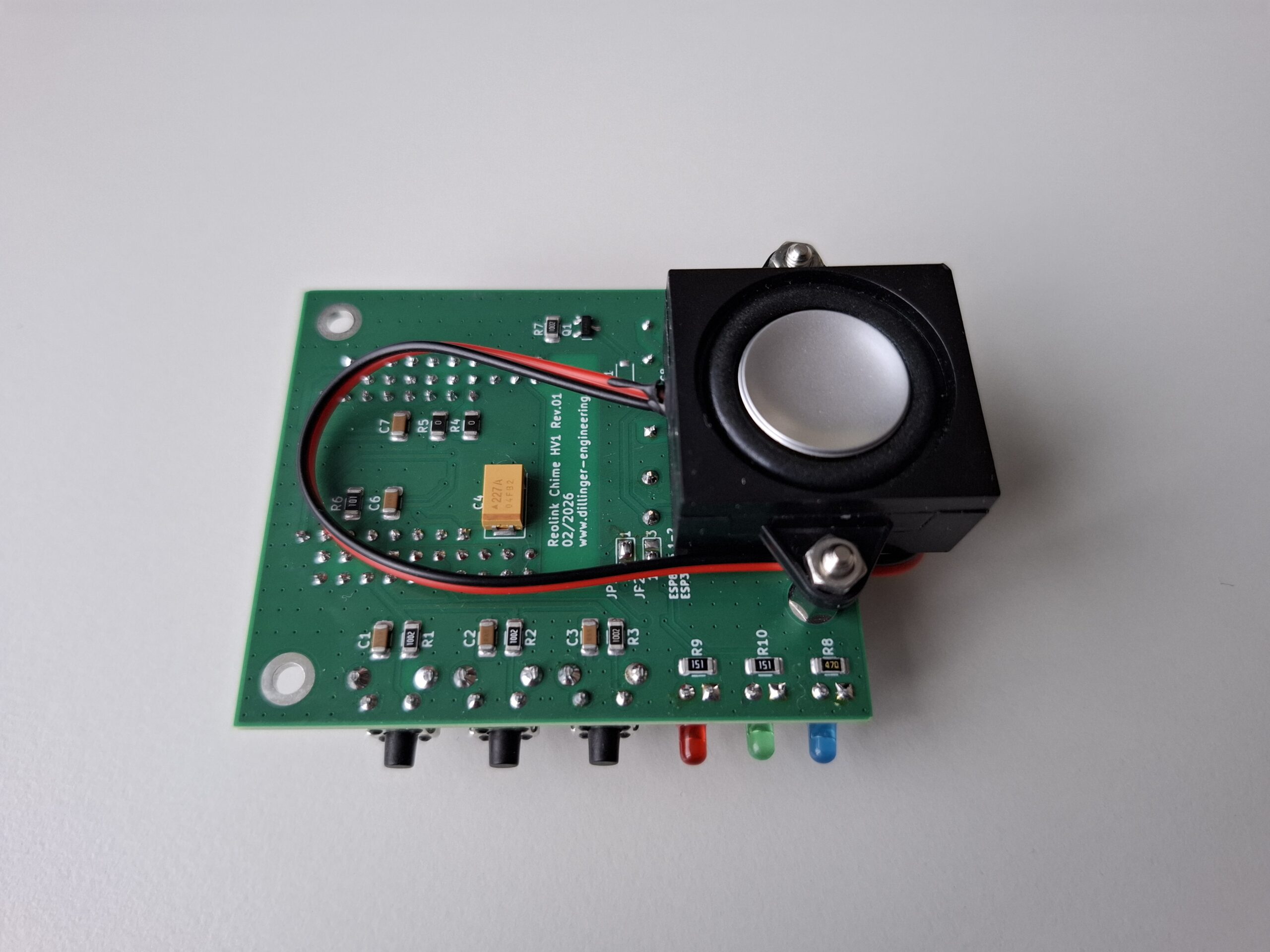
Die Platine mit dem 3W Lautsprecher kann nun in ein beliebiges kleines Gehäuse eingebaut werden und z.B. auch mit einem externen 5V Steckernetzteil versorgt werden.

Die Platine wurde so erstellt, das wahlweise ein WEMOS D1 mini oder ein Wemos ESP32 D1 mini eingelötet werden kann.
Da beide Module eine leicht unterschiedliche Beschaltung für das Boot und Flash verhalten aufweisen, müssen je nach verwendetem WEMOS Modul auf der Platine die beiden Lötbrücken entsprechend verbunden werden!

Um die Platine möglichst kompakt zu halten, wurde der der DF Player mini direkt unterhalb des WEMOS platziert. Der Wemos wird bei dieser Anordnung mit dem üblicherweise mitgelieferten erhöhten einreihigen Buchsenleisten eingebaut.
So bleibt für den DF Player mini noch genügend Platz.
Bei einem entsprechenden Einbau der Platine ist es so möglich, sowohl die USB-Buchse des WEMOS für die Programmierung bzw. Spannungsversorgung als auch die SD-Karte z.B. gut von außen und aus einer Richtung zu erreichen.
Alternativ kann bei einem Einbau des Netzteils in das Gehäuse die Spannungsversorgung aber auch über den JST Stecker J1 auf der Platine erfolgen. Neben dem JST Stecker für die externe Spannungsversorgung befinden sich hier auch der Steckanschluss für den Lautsprecher J3 und ggf. (ESP32) der Steckanschluss J2 für den potentialfreien Schaltausgang um eine externe Klingel anzusteuern.
Platinen Bestellung bei PCBWay
Ich bestelle meine Platinen regelmäßig bei PCBway.
Da der Bestell Prozess dort sehr einfach und unkompliziert ist und mit einem ähnlichen Layout wie bei anderen PCB-Herstellern arbeitet.
Man läd sein Gerber File hoch, wählt die Anzahl der gewünschten Platinen, die Dicke usw. dann ab in dem Warenkorb und zur Kasse. PCBway zeigt den Fortschritt der Bestellung mittels Fortschrittbalken sowie den dazu passenden Videos an, die jeden einzelnen Herstellungsschritt zeigen.
Ich habe mich für den Versand per China Post entschieden da ich keine Eile hatte und die Boards kamen dennoch schnell und gut verpackt an.
Die Qualität der gelieferten Platinen ist sehr gut und ich hatte noch nie Probleme damit.

Das Ergebnis lässt wie ich finde sehen.
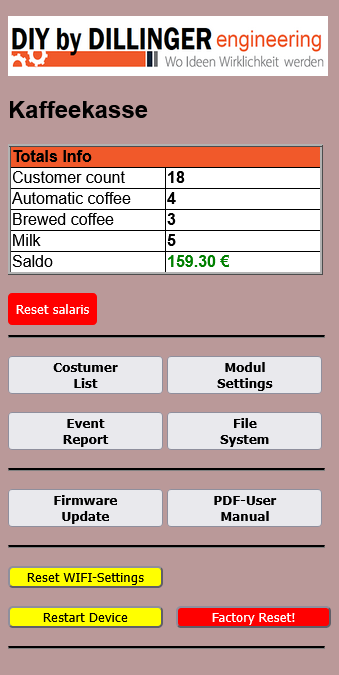
Hier noch ein paar Bilder vom Webinterface



Versionsverlauf:
Released:
- Version 1.00, 27.02.2026
Firmware fertig gestellt und getestet.