Folgende Artikel zu diesem Projekt können in unserem Web Shop erworben werden.
Alle MessageBot Produkte im Shop
Messagebot HV1 Dokumentation
Messagebot Server Software
Das Message Bot Modul stellt verschiedene Messenger Dienste zur Verfügung, WhatsApp, Telegram, Signal und Simplepush.
Um mehrere MessageBot Module gleichzeitig und zentral zu Verwalten besteht auch die Möglichkeit, die Module an eine eigenständige PC-Server Applikation anzubinden.
Key Features
- Verschiedene Messenger Dienste, WhatsApp, Telegram, Signal und Simplepush sowie Windows Server Applikation
- Schnelle Reaktionsgeschwindigkeit
- Funktionen und Texte frei parametrierbar
- Wirkrichtung des Eingangskontakts umschaltbar (NO / NC)
- Eingangskontakt für einen potentialfreien Meldekontakt
- Mikrokontroller ESP-01S mit 1 MB Flash
- Sehr kompakte Bauform
- WIFI-Manager Landing Portal
- Integrierter Web-Server mit Kennwort Abfrage
- OTA (Over the Air) Updatefunktion für Firmware Aktualisierungen
Allgemeines
Das MessageBot Projekt bildet die Brücke um über einen potentialfreien Eingangskontakt frei definierbare Meldung an einen Messenger Dienst zu senden.
Dies könnte beispielsweise der Störmeldeausgang einer Maschine, ein Tür- oder Fensterkontakt, eine Katzenklappe aber auch jeder andere beliebige Meldekontakte sein.
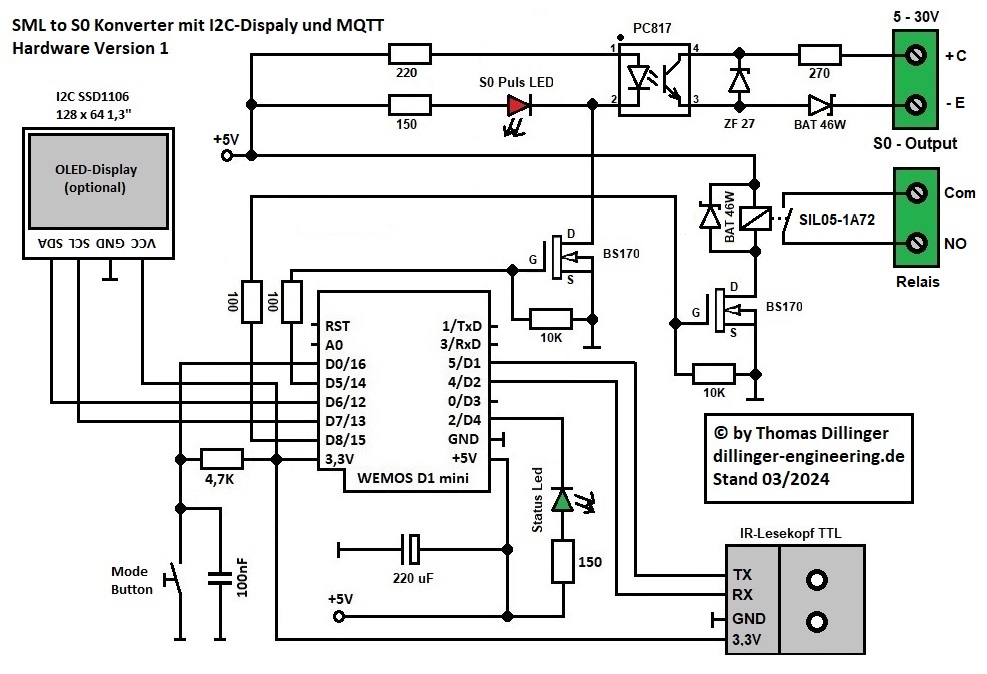
Um Daten von einem Mikrokontroller an diverse Messenger Dienste zu senden, wird bei diesem Modul die API-Schnittstelle benutzt, die von verschiedenen Messanger Diensten zur Verfügung gestellt wird. Über diese API-Schnittstellen ist es möglich, Nachrichten zu vielen verschiednen Diensten wie z.B. WhatsApp, Signal, Telegram, IFTTT, E-Mail, IO-Broker usw. zu senden.
zum Beispiel ist die private Nutzung des CallMeBot (https://www.callmebot.com/) Dienstes ist für eine gewisse Anzahl von Nachrichten kostenlos, danach wird ein kleiner monatlicher Betrag von derzeit 0,40 € / Monat erhoben.
Alternativ kann aber auch der Dienst von Simplepusch, Telegram, Signal oder Simplypush im Modul ausgewählt und verwendet werden.
Zusätzlich steht eine kleine Server Applikation zu Verfügung, die z.B. auf einem zentralen PC oder Server betreiben werden kann. Damit können Nachrichten und Statusmeldungen von mehreren Message Bot Modulen Empfangen, ausgewertete und per E-Mail oder Simplypush an mehrere Abonenten weiterverteilt werden können.
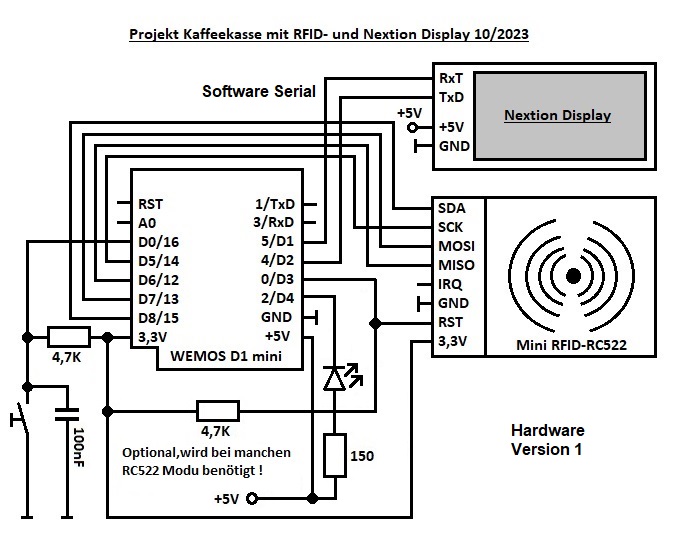
Das MessageBot Modul verfügt über ein ESP-01S Modul der die Firmware enthält und eine WIFI eine Verbindung zum Internet hergestellt. Wird der Send- Message Eingang oder der potentialfreie Eingangskontakt betätigt, löst die steigende bzw. fallenden Flanke des Eingangssignals das senden der jeweils dafür vorher definierten Textnachricht an den hinterlegten Messenger Kontakt aus.
Nach kurzer Zeit erscheint dieser Meldetext dann in der Messanger APP auf dem Smartphone oder der Serverapplikation.
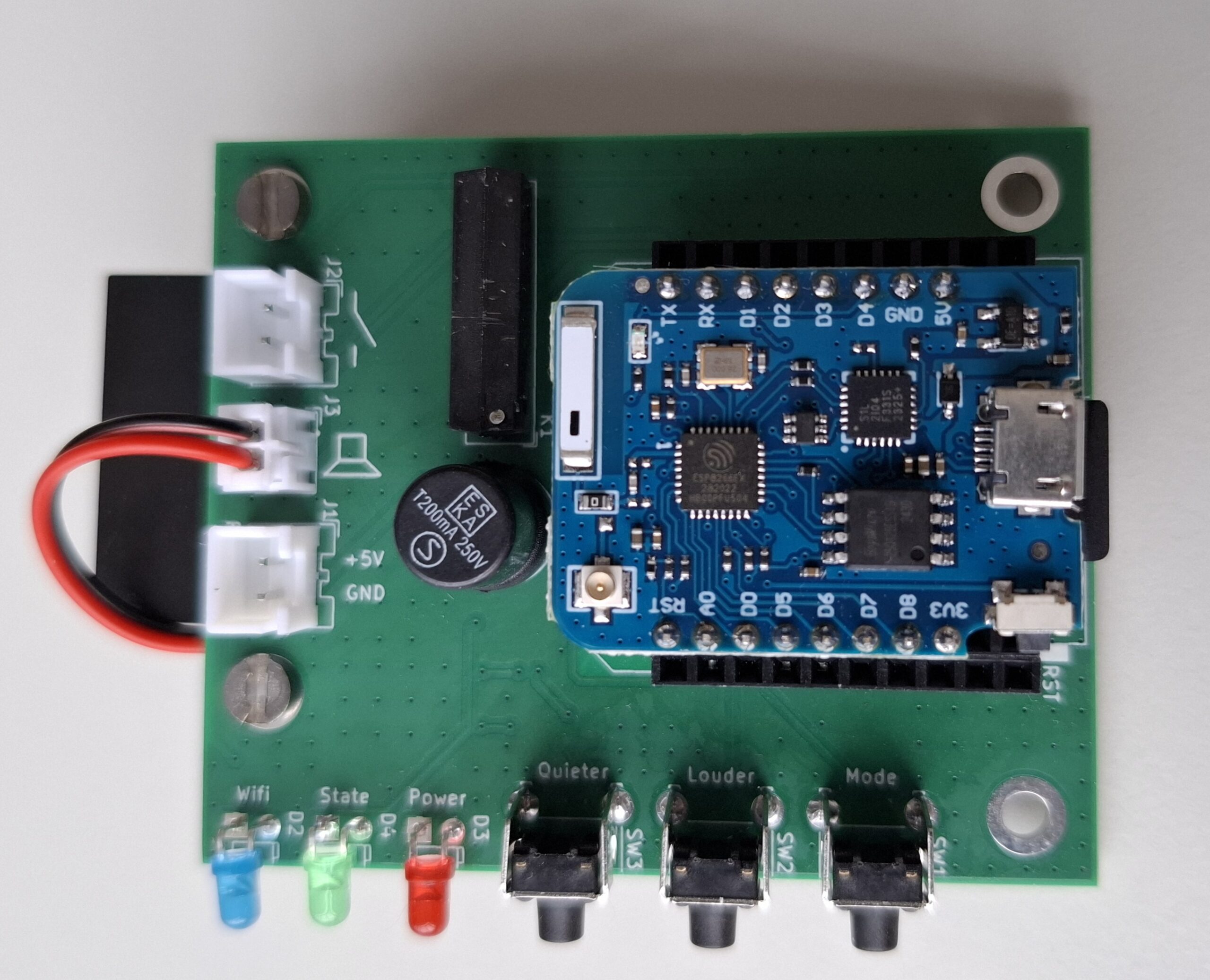
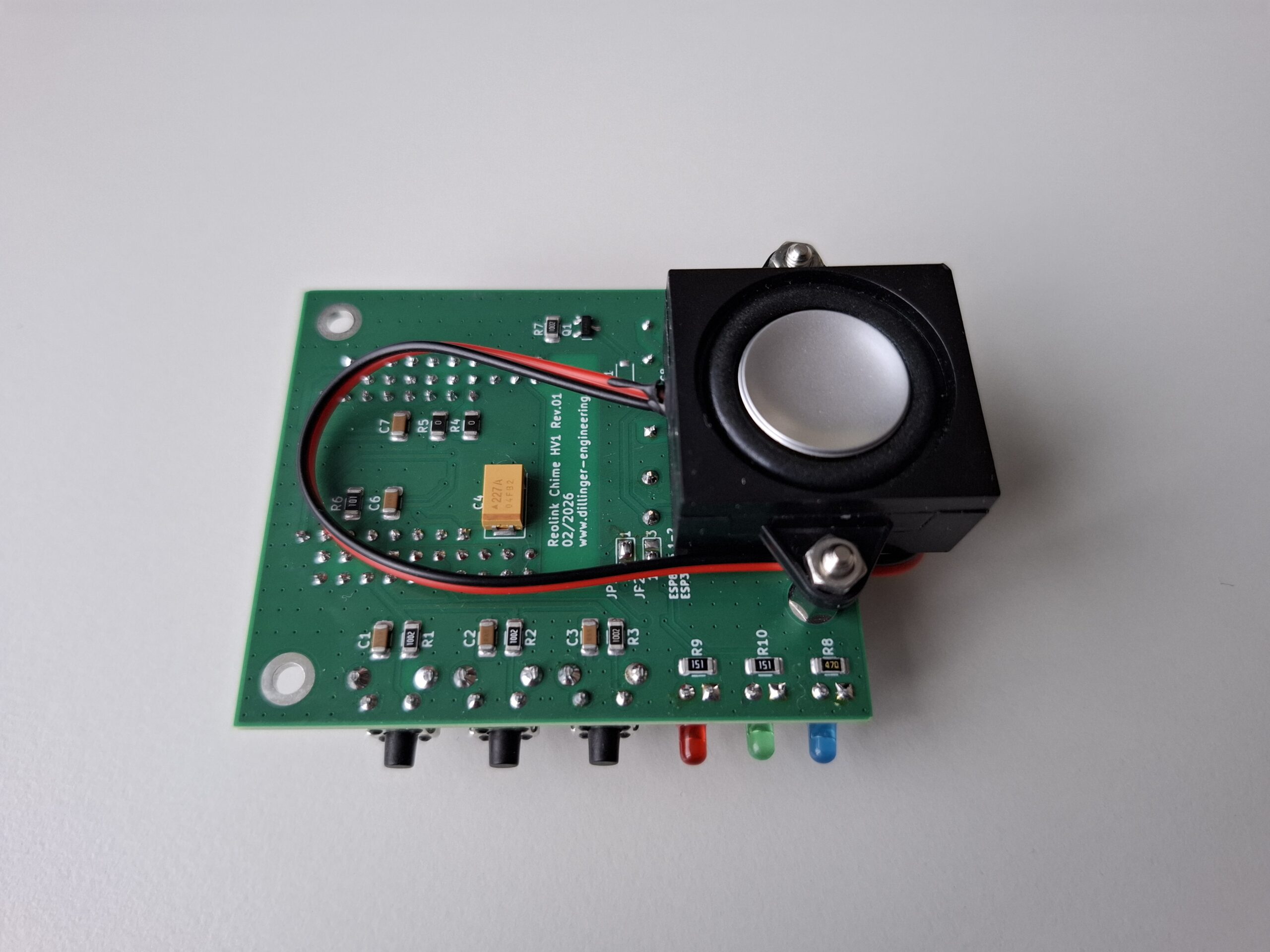
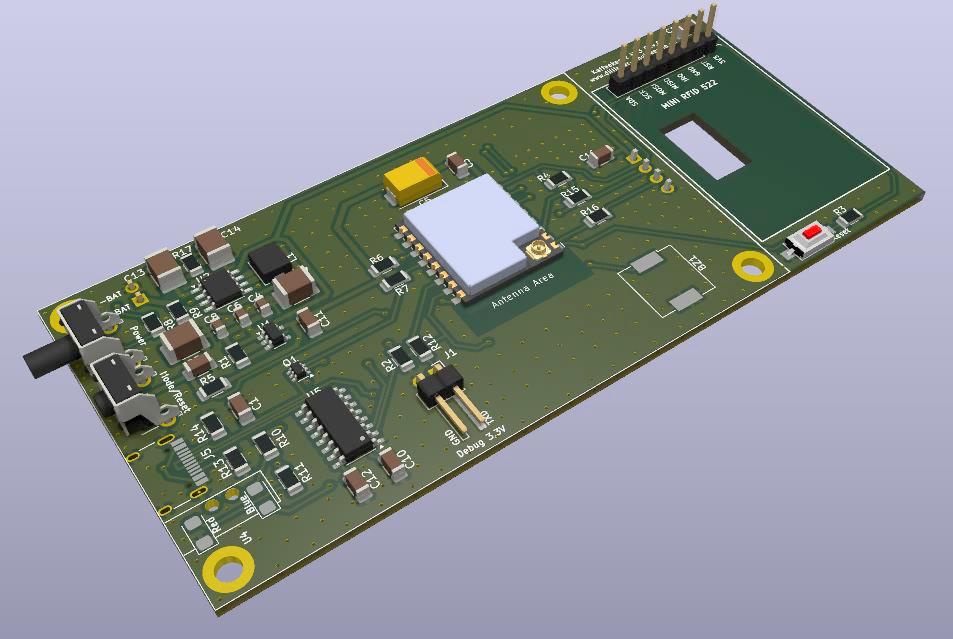
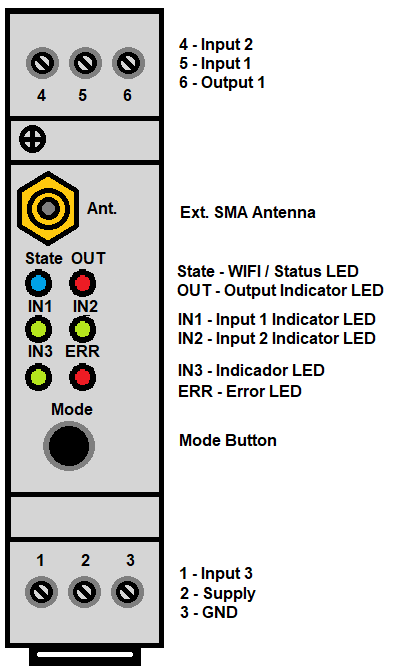
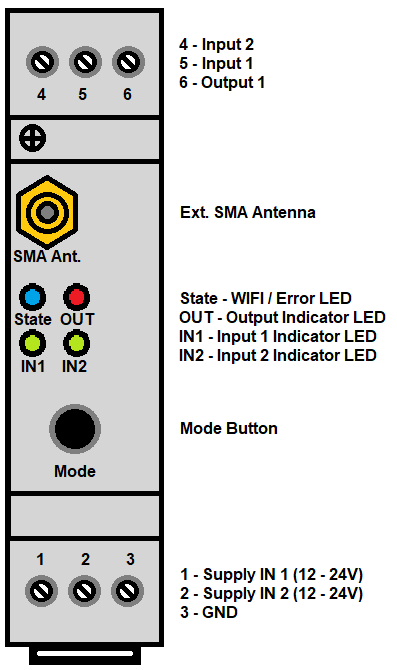
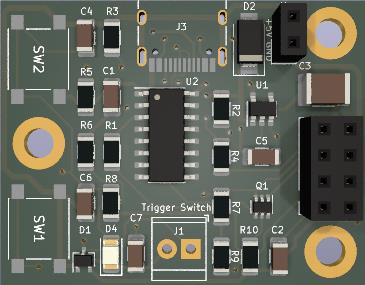
Platine und Anschluss
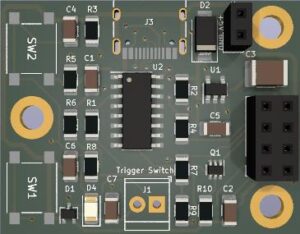
Nach Abschluss der Konzeptphase wurde die obige kompakte MessageBot Platine entwickelt. Diese besitzt für die Programmierung und Spannungsversorgung eine USB-C Anschluss Buchse.
Für das ESP01-S (1MB Modul) wurde die Buchsen Leiste J2 vorgesehen. Die Klemmleiste J1 wurde als Schraubklemme ausgeführt, an die dann ein beliebiger potentialfreier Eingangskontakt angeschlossen werden kann. Dieser Eingang besitzt einen ESD-Überspannungsschutz.
Weiterhin sind zwei Taster vorhanden. Der Taster SW2 ist parallel zum Eingangskontakt geschaltet und kann somit ebenfalls verwendet werden um eine Nachricht zu versenden.
Der Taster SW1 dient zum Zurücksetzen der Parametereinstellungen und um den Bootloader des ESP zu aktivieren
Die Platine kann in zwei Ausbaustufen bestückt bzw. geliefert werden. Einmal in einer minimalen Bestückung, die lediglich für das Versenden von den Messages verwendet wird.
In der zweiten Ausbaustufe kann die Platine für die Programmierung und die Entwicklung verwendet zu werden. Die zweite Ausbaustufe ist für den reinen Messanger Betrieb nicht erforderlich, da nach der ersten Programmierung des ESP-01S Moduls (z.B. mit einem externen Programmieradapter) Updates der Firmware jederzeit über OTA erfolgen können.
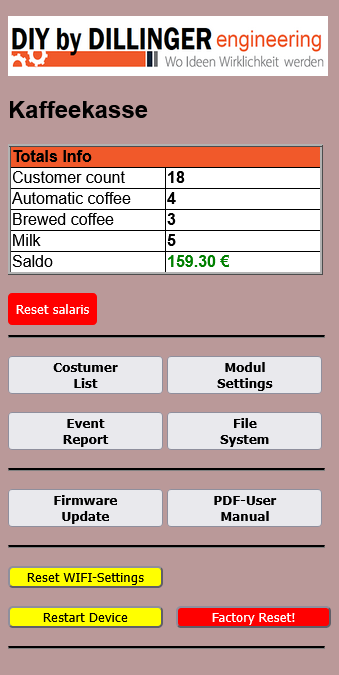
Weboberfläche
Die Weboberfläche kann über die lokale IP-Adresse in Ihrem Netzwerk, mit einem Webbrowser aufgerufen werden. Sie dient der Änderung der MessageBot Konfigurationseinstellungen und der Auswahl des Messenger Dienstes (WhatsApp, Signal, Telegram oder Simplepush) über den die Nachrichten später versendet werden sollen.
Hier können auch die WIFI-Einstellungen zurückgesetzt oder nach neuen Firmware Update gesucht werden.
Änderungen an der MessageBot Konfiguration werden direkt nach dem Übernehmen mit dem Submit Button aktiv. So dass weder der WIFI-Manger erneut aufgerufen noch das Modul neu gestartet werden muss.
Aus Sicherheitsgründen wurde für das aufrufen der Weboberfläche eine Eingabedialog mit Benutzername und ein Kennwort Abfrage eingefügt!
Die Standard Anmeldedaten für die Eingabeaufforderung lauten:
Benutzername: admin
Kennwort: Password
Hinweis:
Sollte keine Sicherheitsabfrage für die Weboberfläche gewünscht sein, kann das Kennwortfeld einfach leer gelassen werden. Es erscheint dann zukünftig kein Anmeldedialog mehr beim Aufrufen der Weboberfläche.
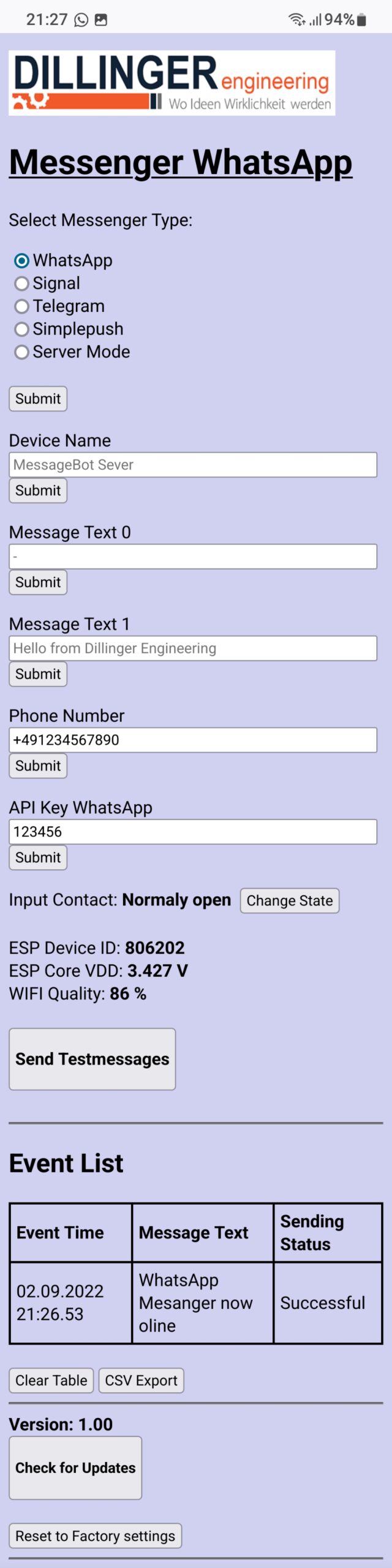
- „Select Messanger Type“ dient der Auswahl des Messenger Dienstes, an den die Nachrichten versendet werden soll. Je nach Auswahl erscheinen unterschiedliche Dialogfelder für die Eingabe der Daten für den ausgewählten Dienstanbieter auf der Webseite. Um eine Eingabe zu speichern, muss abschließend der „Submit“ Button gedrückt werden.
- Der „Devicenname“ dient der Identifikation des Message Bot Moduls an Hand eines frei definierbaren Klartextnamens. Dieser Name wird im Tab des Webbrowsers und als erste Textzeile ihrer Nachricht, sowie als WLAN Access Point Name angezeigt.
Im Server Modus wird dieser Name ebenfalls als Gräte Name zur Identifikation in der Gerätekonfiguration angezeigt.
Die Eingabe des Devicename erfolgt mit 5-30 Zeichen, ungültige Eingaben werden ignoriert. Um den neuen Wert zu speichern, muss abschließend der „Submit“ Button gedrückt werden.
- Der „Message Text 0″ ist der Textliche Inhalt einer gehenden Meldung die an den Dienst versendet werden soll.
Um keine Meldung zu senden, wenn der Eingang zurückgesetzt wird, kann hier der Platzhalter Bindestrich „-„ eingetragen werden. Die Eingabe des Message Textes erfolgt mit 1-50 Zeichen, ungültige Eingaben werden ignoriert. Um den neuen Wert zu speichern, muss abschließend der „Submit“ Button gedrückt werden.
- Der „Message Text 1″ ist der Textliche Inhalt einer kommenden Meldung die an den Dienst versendet werden soll.
Um keine Meldung zu senden, wenn der Eingang zurückgesetzt wird, kann hier der Platzhalter Bindestrich „-„ eingetragen werden. Die Eingabe des Message Textes erfolgt mit 1-50 Zeichen, ungültige Eingaben werden ignoriert. Um den neuen Wert zu speichern, muss abschließend der „Submit“ Button gedrückt werden.
- Das Feld „Phone Number“ erscheint bei der Auswahl von WhatsApp und Signal und enthält Ihre Telefonnummer mit Ländervorwahl z.B. +491234567890. Die Eingabe der Phone Number erfolgt mit 8-15 Zeichen, ungültige Eingaben werden
ignoriert. Um den neuen Wert zu speichern, muss abschließend der „Submit“ Button gedrückt werden.
- Das Feld „API Key [WhatsAPP | Signal | Simplepush]“ erscheint bei der Auswahl von WhatsApp, Signal und Simplepush und enthält die Ziffernfolge, die Sie vom Dienstanbieter nach der Registrierung erhalten haben.
Die Eingabe des API Key erfolgt mit 1-6 Ziffern, ungültige Eingaben werden ignoriert. Um den neuen Wert zu speichern, muss abschließend der „Submit“ Button gedrückt werden.
- Das Feld „Input Contact“ zeigt die Ruhestellung des potentialfreien Eingangskontakts an. Die Wirkrichtung kann mit der Taste „Change State“ zwischen „Normaly open“ und „Normaly closed“ umgeschaltet werden. Steht die Auswahl z.B. auf „Normaly open“ und wird der Eingangskontakt dann geschossen, wird der Message Text 1 versendet.
- Die Anzeige „ESP-Device ID“ gibt die jeweilige Device ID des ESP Mikrokontrollers zurück, die aus einem Teil der MAC-Adresse besteht und so eindeutig dem entsprechenden Modul zugeordnet werden kann.
Im Server Mode Betrieb dient diese ID der eindeutigen Identifikation der einzelnen Message Bot Module.
- Die „ESP-Core VDD“ zeigt die Versorgungsspannung des Mikrokontrollers an, diese sollt sich für einen stabilen Betrieb im Bereich zwischen min. 3.0V – max. 3.5V bewegen.
Handelt es sich um ein Batteriebetriebenes Messanger Bot Modul, wird hier die aktuelle Batterie Spannung angezeigt!
- Die Anzeige „WIFI-Quality“ zeigt die aktuelle Empfangsqualität des WIFI-Signals in Prozent an.
- Der Taster „Send Testmessage“ sendet mit den vorhandenen Einstellungen eine Nachricht an die gespeicherten Teilnehmerdaten. Hierbei wird der Textinhalt der kommenden- und gehenden Meldung versendet. Um keine entsprechende Nachricht zu versenden, kann der Platzhalter „–„ in das entsprechende Textfeld eingetragen wurde.
- Die „Event Tabelle“ enthält die letzten 15 Ereignisse mit Zeitstempel und Sendestatus. Diese Daten können bei Bedarf mit dem Button „CSV-Export“ als CSV-Datei auf den lokalen Rechner gespeichert und dann z.B. mit Excel geöffnet und weiterverarbeitet werden.
- Mit dem Taster „Update“ sucht das Message Bot Moduls nach einer neueren Firmware Version im Internet. Die aktuelle Versionsnummer wird in der Weboberfläche angezeigt. Bitte informieren Sie sich vor einem Update über die Änderungen auf der Webseite des Herstellers.
Bitte überprüfen Sie nach jedem Firmware Update die Message Bot Moduleinstellungen, da sich dadurch ggf. Änderungen oder ein erweiterter Funktionsumfang ergeben haben könnten.
- Mit dem Taster „Reset to Factory settings Parameters“ werden die die Werkseinstellungen wieder hergestellt. Danach müssen die Verbindungsdaten im WIFI-Manager (Konfigurationsportal) des Message Bot Moduls neu eingetragen werden.
MessageBot Windows Server Applikation
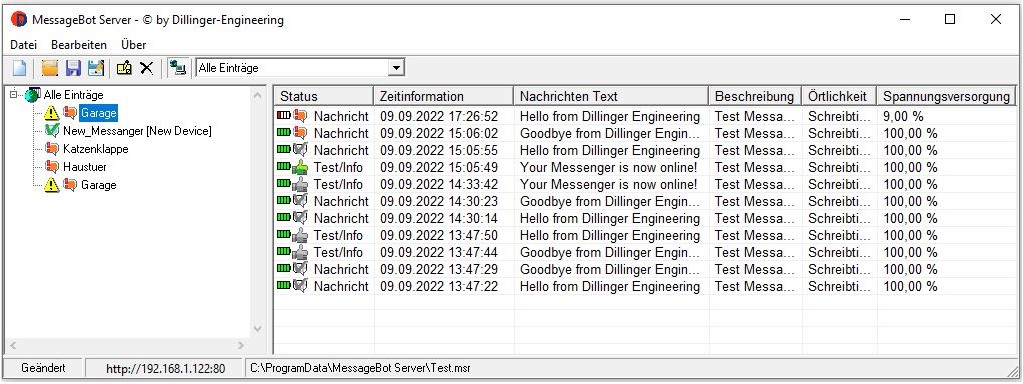
Die MessgeBot Server Applikation wurde für Windows als zentrale Sammelstelle von Nachrichten verschiedener MessageBot Module entwickelt.
Sie wird auf einem zentralen PC oder Windows Server installiert und wartet auf Nachrichten der MessageBot Module.
Wird die erste Nachricht von einen Modul empfangen, wird die Baumansicht automatisch um einen Zweig erweitert und das neue Modul als Datensatz eingefügt.
Dieser Moduldatensatz bietet viele Informationen über das Modul wie z.B. die aktuelle Hard- und Software Version, die Betriebsspannung, die Modul ID, die aktuelle IP-Adresse und den Bot Namen. Dieser Datensatz kann dann um weitere spezifische Informationen ergänzt werde.
So kann nach dem erhalt einer neuen Nachricht z.B. eine E-Mail an eine hinterlegte Empfängerliste versendet werden. Zusätzlich besteht die Möglichkeit den Online Status des MessageBot Moduls zu überwachen und bei einer Störung ebenfalls eine E-Mali Benachrichtigung versendet werden.
Die eingehenden Nachrichten der verschiedenen Module werden chronologisch sortiert in einer Listenansicht angezeigt und können dort bearbeitet werden. Je nach Filter Auswahl und selektiertem Modul, werden verschiede Listenansichten erzeugt.
Offene, bearbeitete oder ausgeblendete, Nachrichten werden mit verschieden Symbolen gekennzeichnet. Zusätzlich gibt es Statussymbole für eine Unterbrochene Verbindung zum Modul und den Zustand der Spannungsversorgung.
In der Baumansicht wird durch ein entsprechendes Symbol darauf hingewiesen ob für dieses Modul offene Meldungen vorhanden sind.
Das Programm kann so konfiguriert werden, dass nach jedem neuen Nachrichteneingang automatisch ein Backup Datei der aktuellen Daten gespeichert wird. Diese Backups könne vom Anwender über einen Kalenderfunktion selektiert und bei Bedarf wieder geöffnet oder aus dem Programmordner gelöscht werden.
Für die Server Applikation steht eine Setup Datei zur Verfügung, mit der das Programm komfortabel auf dem Rechner installiert und deinstalliert werden kann. Diese Version ist eine Demo Version, die maximal fünf Messanger Module verwalten kann. Sollten Sie mehr Module benötigen, kann dies durch den erwerb einer entsprechenden Software Lizenz bei uns erworben werden.
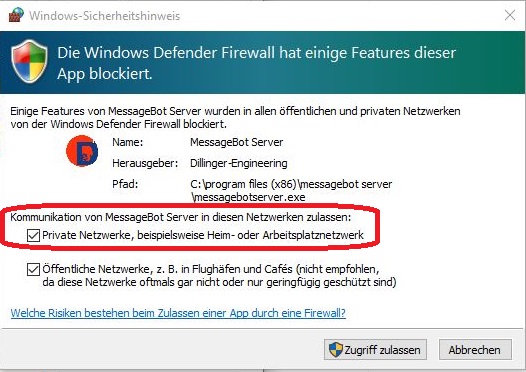
Windows Defender Firewall Einstellung
Da die Kommunikation der MessageBot Module über das lokalen WIFI-Netzwerk stattfindet, muss für die MessageBot Server Applikation nach dem ersten starten die Windows Firewall Richtlinie auf dem Zielrechner angepasst werden.
Der folgenden Dialog erscheint nach dem ersten Start der Applikation. Hier muss auch der Haken für „Private Netzwerke von MessageBot Server in diesem Netzwerk“ freigegeben werden!
Hinweis:
Mit dieser Freeware Test Version können maximal drei Module Verwaltet werden.
Für eine Erweiterung der Modul Anzahl können Sie in unserem Shop verschieden Lizenzen erworben werden.
Wünschen Sie eine Anpassungen der Software an Ihre Bedürfnisse geben wir gerne ein unverbindliches Angebot ab.
Versionsverlauf:
Intended:
- Version 1.01
Impulszähler Funktion.
Released:
- 31.08.2022 Version 1.00
Serveranbindung realisiert.
- 19.07.2022 Version 1.00
Sonderzeichen ermöglicht „ÄäÖöÜüß“, NTP-Server und Event Tabelle mit bis zu 15 Einträgen integriert. Anzeige der WIFI-Empfangsstärke in % im Webinterface.
ESP-ID und Core VDD eingefügt.
Erweiteung der Messenger Dienste
- 29.06.2022 Version 1.00rc0
Projekt Begin