Pressure Sensor Dokumentation218 Downloads
Pressure Sensor Dokumentation218 Downloads

Der fertige Busatz und der Source Code zu diesem Projekt kann in meinem Web Shop erworben werden.
Diese Druckmessplatine eignet sich hervorragend für die Messung verschiedener Medien und Duckmessbereiche, durch ihre flexible Konfigurierbarkeit ist sie für die verschiedensten Aufgaben im Bereich der Druckmessung einsetzbar.
Für verschiedene Druckmessbereiche stehn eine ganze Reihe verschiedener Drucksensors zur Verfügung.
Druckbereich: 5 psi, 15 psi, 30 psi, 60 psi, 100 psi, 150 psi und 200 psi.
Key Features:
- Einsatz für Druckmessungen in verschiedenen Druckbereichen
- Vielseitig einsetzbar
- Weiter Eingangsspannungsbereich von 8 – 27V
- Konfiguration aller Modulparameter direkt am Pressure Sensor Modul möglich
- OLED-Display für die Anzeige der Messwerte und der Menüfunktionen
- Bedienung über einen Drehwahlschalter oder einen Taster
- Drei konfigurierbare potentialfreie Ausgangskontakte für das Über- und Unterschreiten einer einstellbaren Druckschwelle, sowie eines Sensorfehlers
- Für jedes Relais kann die Ruhelage NO (normally open) oder NC (normally closed) separat festgelegt werden
- Werte- und Fehleranzeige im Sensor Sensordisplay
- Werte- und Fehleranzeige über die Blynk App und ein Web Interface zugänglich
- Messwerte- und Statusmeldungen im Textformat über integrierte Micro USB-Schnittstelle (seriell Port)
- Vielseitige auch für beliebige andere Druckmessaufgabe eingesetzt Messung
- Zwei verschiedene Messmethoden, Messung des absoluten oder des relativen Drucks
- Manuelle und automatische Kalibrierung bei der relativen Druckmessung
- Spezielle Funktion für Druckschlauchmessungen, automatischen Differenzdruckabgleich
- Teilbares System, dass aus einem wechselbaren Drucksensor, dem eigentlichen Auswertemodul
- Menügeführte kundenspezifisch Sensoranpassung.
- Aktualisierung der Firmware mittels OTA
Allgemeines
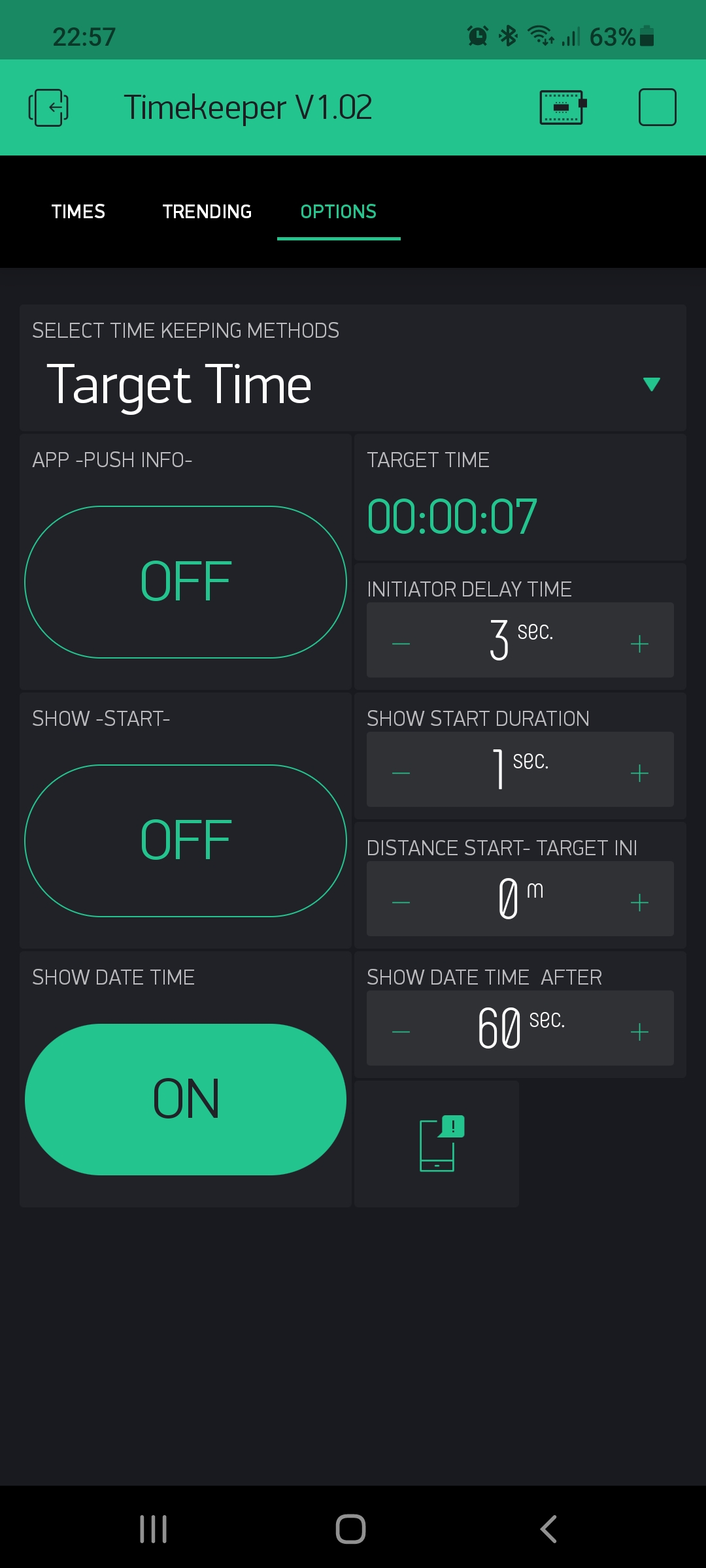
Die hier beschriebene Druckmessung entstand aus dem Projekt Timekeeper, dass auf Anfrage für eine Zeitmessung zu Trainingszwecke für eine Gleichmäßigkeitsprüfung durchgeführt wurde.
Als der Timekeeper beim Auftraggeber im Einsatz war, stellte sich heraus, dass das justieren der Lichtschranken gerade bei Sonnenschein eine mühselige Unterfangen darstellt.
Außerdem hängt die Genauigkeit der Erfassung hierbei auch immer von der Justierung der Lichtschranken ab. Da je nach Höhe und Winkel der Start- und Ziellichtschranke, diese bei verschieden Fahrzeugen unterschiedlich ausgelöst werden können. Diese Fehler bewegen sich zwar meist nur in Millisekunden Bereichen, können aber durchaus die Wertungsergebnisse beeinflussen.
So wurde die Idee geboren, einen alternative Messmethode zu testen. Es sollte eine Druckschlauchmessung aufgebaut werden, die quer über die Fahrbahn gelegt werden kann, umso eine Messmethode zu erhalten, die direkt an den Rädern des Fahrzeugs misst. Also Unabhängig von der Form und Bauart der Karosserie.
Es wurde ein PVC-Schlauch, der an einem Ende geschlossen war, an eine Handelsübliche Druckmessung angeschlossen und der Potentialfreie Ausgangskontakt mit dem entsprechenden Initiator Eingang des Timekeeper Moduls verbunden.
Die ersten Tests lieferten bereits sehr viel versprechend Ergebnisse und bewiesen, dass der grundsätzliche Testaufbau funktionierte.
Nach dem die ersten Erfahrungen mit verschiedene Schlauchmaterialien, Druckaufnehmer und den in der Praxis auftretenden Störeinflüssen gesammelt wurden. War schnell klar, dass eine handelsübliche Druckmessung die Anforderungen an diese Aufgabe nur bedingt erfüllen kann.
Der Nachteil eines solchen Messverfahrens ist eine vergleichsweise ungenaue Messung, da die Kunststoffschläuche ein gewisses Eigenleben haben, das zum Beispiel zu temperaturabhängigen Kriecheffekten und Offsetproblemen führt.
Es musste also eine speziell auf diese Art der Anwendung zuggeschnittene Lösung entwickelt werden.
Spezielle Funktion für die Schlauchdruckmessung
Das Hauptproblem stellt nicht die Messung an sich dar, sondern die Umgebungsbedingungen. Den der Druck im inneren des Schlauches ist natürlich in erster Linie abhängig von der Umgebungstemperatur.
Stellen wir uns folgendes vor, der Messaufbau wird am frühen Morgen installiert und getestet. Die Auslöseschwelle beim Überfahren des Schlauchs wird auf ein optimales Auslöseverhalten für die Art und Länge des Schlauchs programmiert.
Der Tag beginnt mit einem relativ kühlen Vormittag, entwickelt sich aber gegen die Mittagszeit zu einem sehr sonnigen Tag.
Am Nachmittag entstehen am Himmel größere vorbeiziehende Wolkenfelder.
So könnte ein normaler Sommer Tag aussehen … was passiert aber nun mit dem Druck im Sensorschlauch?
In der Früh wurde die Messung kalibriert und optimal eingestellt.
Am Vormittag steigt der Druck im Schlauchsensor jedoch stetig an. Im Extremfall sogar bis über die programmierte Auslöseschwelle.
Am Nachmittag wechselt der Druck im Schlauch im Verhältnis der vorbeiziehenden Wolkenfelder hin und her.
All dies hat Einfluss auf das Auslöseverhalten und die Genauigkeit der Messung und kann sogar zu Fehlauslösungen führen.
Genau für diesen Anwendungsfall wurde eine spezielle Zusatzfunktion in diese Druckmessung integriert.
Diese überwacht ständig den Druck im Sensorschlauch, steigt bzw. fällt der Druck (Delta P) über- oder unter einen programmierbaren Schwellwert und bleibt für eine definierbare Zeit (t) außerhalb der definierten Grenze, wird eine (AC) automatische Nullpunkt Kalibration des Relativdruckwertes durchgeführt.
Aufgabenstellung:
Es sollte eine Druckmessung mit einem weiten Eingangsspannungsbereich von 8 – 27V entwickelt werden.
Damit ein Betrieb mit einem Bleiakku (12V KFZ-Batterie), einem externen Netzteil oder eine direkte Versorgung aus dem Timekeeper Modul möglich ist. Dieser wird üblicherweise mit 24V gespeist.
Die Konfiguration der Modulparameter sollte direkt am Pressure Sensor Modul möglich sein. Für die Anzeige sollte ein kleines OLED-Display für die Anzeige der Messwerte und der Menüfunktionen vorhanden sein. Die Bedienung erfolgt dabei über einen Drehwahlschalter bzw. alternativ über einen Taster, der die Navigation und Auswahl der Menü Punkte erlaubt.
Das Modul sollte über drei konfigurierbare, potentialfreie Ausgangskontakte verfügen. Welche das Über- und Unterschreiten einer einstellbaren Druckschwelle, sowie einen Sensorfehler ausgeben können. Für jedes dieser drei Relais kann die Ruhelage NO (normally open) oder NC (normally closed) separat festgelegt werden.
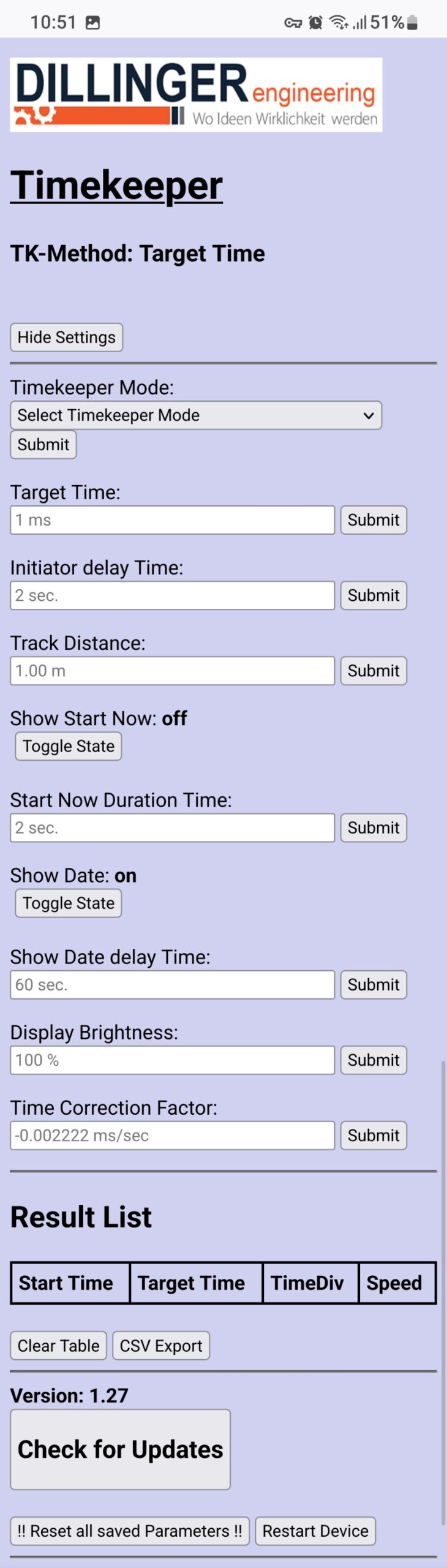
Optional zur Werte- und Fehleranzeige am Sensor Modul, sollten diese Informationen auch über die Blynk App und ein Web Interface zugänglich sein.
Über die integrierte Micro USB-Schnittstelle sollen nach Aktivierung dieser Funktion im Menu, die Messwerte sowie die Statusmeldungen im Textformat ausgegeben werden. Damit diese für eine externe Weiterverarbeitung genutzt werden können.
Bei der Entwicklung der Messung sollte Wert daraufgelegt werden, dass diese sehr vielseitig, auch für beliebige andere Druckmessaufgabe eingesetzt werden kann.
Es sollen zwei verschiedene Messarten möglich sein, Messung des Absoluten Drucks sowie die Messung des Relativen Drucks.
Die Messung des Relativen Drucks sollte auch manuell Kalibriert werden können.
Für den Einsatz in Verbindung mit einer Druckschlauchmessung, muss eine spezielle Funktion implementiert werden, die bei Bedarf einen automatischen Differenzdruckabgleich durchführen kann. Dieser soll immer dann durchgeführt werden, wenn der Druck einen definierbaren Schwellwert (P) für eine definierbare Zeit (t) über- bzw. unterschreitet.
Das Pressure Sensor Modul sollte ein Teilbares System werden, das aus einem wechselbaren Drucksensor, dem eigentlichen Auswertemodul und einem schnell wechselbaren Schlauchsystem besteht.
Auf diese Weis ist es leicht möglich das Sensorsystem je nach Anforderung kundenspezifisch anzupassen.
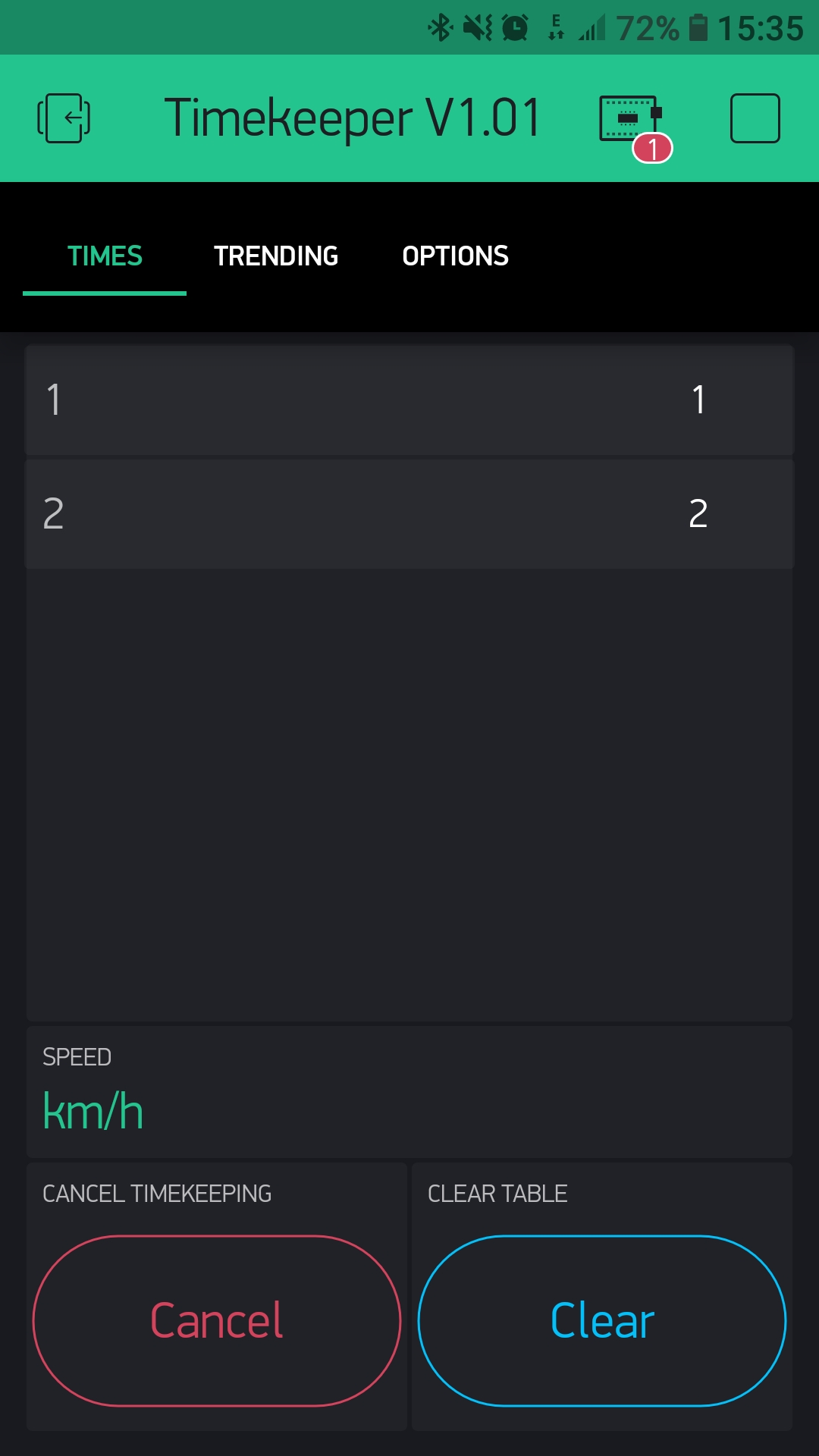
In einem weiterer Entwicklungsschritt, soll die Firmware um eine eigenständige Zeitnahme Funktionalität erweitert werden.
Die Zeitmessung beginnt mit dem ersten Überfahren des Schlauchsensors und endet mit dem zweiten Überfahren.
Damit die Zeitmessung nicht sofort nach dem Überfahren mir den Hinterreifen wieder beendet wird, soll eine Verzögerungszeit zwischen der Start- und Endzeiterfassung eingegeben werden können, um dies zu verhindern.
Der Drucksensor:
Der verwendete Drucksensor ist ein analog arbeitender Sensor.
Er besitzt ein robustes Edelstahlgehäuse in dem sich ein präziser Druckkeramiksensor befindet. Die Vorverarbeitung des Messwerts übernimmt ein integrierter Mikrocontroller.
Der Sensor besitzt eine lange Lebensdauer bei einer geringen Langzeitdrift.
Die Verbindung zur Auswerteelektronik wird über eine dreipolige wasserdichte PACK-Steckverbindung hergestellt.
Die Versorgungsspannung des Sensors beträgt 5V ± 0,25V
Die Sensoren gibt es mit verschiedenen Druchmessbereichen, die jeweils im Menü des Pressure Sensors ausgewählt werden können.
Sensortypen: 5 psi, 15 psi, 30 psi, 60 psi, 100 psi, 150 psi, 200 psi
 Weiter Infos zu den Sensoren finden Sie in der ZIP-Datei.
Weiter Infos zu den Sensoren finden Sie in der ZIP-Datei.
Der Analogausgang arbeitet in einem Spannungsbereich von 0,5V – 4,5V linear zum Skalendruck. Der Zerstörungsdruck liegt beim 3-fachen Skalendruck.
Da der Sensorwert über ein Analogsignal im Bereich von 0,5V – 4,5V übertragen wird, ist es leicht möglich, beim einem Über- bzw. Unterschreiten dieser Werte, eine Drahtbruch bzw. Kurzschluss Auswertung vorzunehmen.
Farbcode der Sensoranschlussdrähte:
- Analogausgang 0,5-4,5V Grün
- +5V (VDD) Schwarz
- Masse (GND) Rot
Anschlussbelegung Hardware
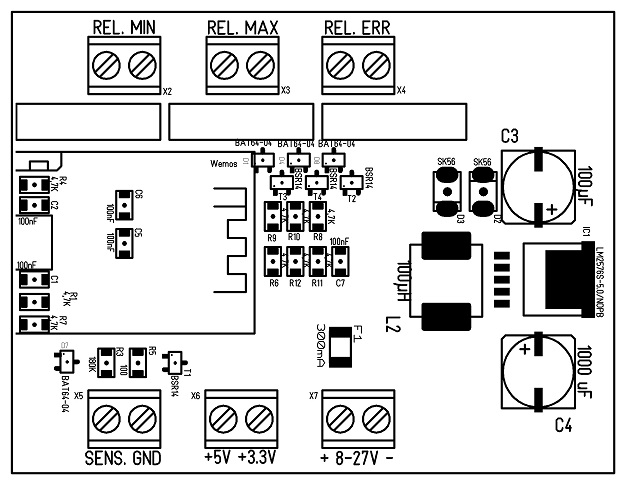
REL. MIN Potentialfreier Kontakt für eine min. Druck
REL. MAX Potentialfreier Kontakt für eine max. Druck
REL. ERR Potentialfreier Kontakt für eine Sensorstörung
SENS. Sensor analog Eingang max. 0-5V
GND Ground (Minus)
+5V Spannungsversorgung 5V Sensor
+3,3V Spannungsversorgung 3,3V Sensor
+8-27V- Spannungsversorgung Pressure Sensor Modul
Versionsverlauf:
Intended:
- Nichts in Planung
Released:
- 03.05.2021: Version X.01 (für alle Hardware Versionen)
– Ergebnisliste im Webserver
– Ergebnistabelle im Webserver als CSV exportierbar
– Anzeige der Ergebnisse in der Blynk App.
– Konfiguration verschiedener Drucksensoren von 5 psi – 200 psi - 15.12.2020: Version 1.00
– Druckmessung relativ / absolut
– Autocalibration
– Sensorfehlererkennung Relaisausgang NC/NO
– Seriale Ausgabe der Werte über USB,
– Min/Max Wert Relaisausgänge NC/NO
– Webbrowser Darstellung
– Blynk Applikation