Key Features:
- Schnelle Reaktionsgeschwindigkeit durch DS18B20 Temperatursensoren
- Kompakte Bauform ©Sonoff TH 16 Schaltmodul
- Landing Portal für die WIFI und MQTT Konfiguration
- ©Amazon Alexa Anbindung (Zirkulation Start/Stop) bzw. über entsprechende Routinen
- Einsparung von Heiz- und elektrischer Energie
- Kurze Amortisationszeit
- Maximaler Komfort bei der Warmwasserbereitstellung
- Minimale Pumpenlaufzeiten, geringer Verschleiß
- Optionaler Rücklaufsensor für eine noch bessere Effizienz
- Leichte Integration in eine vorhandene Automatisierung durch MQTT-Client Funktion
- Weboberfläche zur optimalen Parametrierung auch ohne MQTT
- Firmware über OTA-Updates
Allgemeines:
Die Zirkulationspumpe in ihrer Trinkwasseranlage sorgt dafür, dass auch an weit entfernten Entnahmestellen jederzeit warmes Wasser zur Verfügung steht, ohne das vorher minutenlang Wasser ungenutzt im Abfluss verschwindet.
Dies geschieht durch eine ständige Zirkulation von heißem Wassers zwischen dem Warmwasserspeicher und der letzten Entnahmestelle ihrer Trinkwasseranlage, was letztendlich zu hohe Wärmeverlusten des Warmwasserspeichers führt. Abgesehen von diesen Wärmeverlusten, wird zusätzlich auch ständig elektrischer Energie für den Betrieb der Zirkulationspumpe benötigt, was über die gesamte Lebensdauer der Anlage mit hohen Kosten zu Buche schlägt.
Um diese Verluste möglichst gering zu halten, ist die üblichste und günstigste Lösung, eine einfache Zeitschaltuhr mit Tagesprogramm. Die Zeitschaltuhr wird in den Stromkreis zwischen Steckdose und Zirkulationspupe geschaltet, um außerhalb der üblichen Entnahmezeiträume die Zirkulationspumpe vom Stromnetz zu trennen.
Der Nachteil bei dieser Lösung liegt jedoch darin, dass bei einem anderen Nutzungsverhalten die Pumpe aus ist und kein warmes Wasser zur Verfügung stellt oder die Pumpe läuft zu Zeiten, obwohl gar kein warmes Wasser benötigt wird. In beiden Fällen geht viel Energie verloren und eine komfortable Bereitstellung von warmem Wasser ist nicht gegeben.
Die Lösung:
Im hier vorgestellten Projekt soll nun gezeigt werden, wie diese Problematik mit einem handelsüblichen ©Sonoff TH10/16 (10/16A) WLAN-Schaltmodul und einem daran angeschlossenen DS18B20 Temperaturfühler einfach und schnell gelöst werden kann.
Das TH10/16-Modul ist eins der wenigen Module der Firma ©Sonoff, das über ein kleines Schaltnetzteil verfügen und nicht wie viele der anderen Module über einen Kapazitives Netzteil. Der große Vorteil hierbei ist hier die Galvanischetrennung zwischen dem 230V Stromnetz und der daran angeschlossenen Elektronik. So ist es möglich über eine kleine vierpolige 2,5 mm Klinkenbuchse Sensoren direkt mit den IO-Pins des ESP8266 Mikrokontroller zu verbinden, ohne dass Netzspannung an den Sensoren anliegt.
Das TH10/16 Modul inklusive eines DS18B20 Temperatursensors kostet kaum mehr als eine elektronische Zeitschaltuhr, bringt aber ein Maximum an Energieeinsparung und das ohne einen Eingriff in die bestehende Hausinstallation vornehmen zu müssen.
Das Modul kann direkt bei Amazon mit kurzen Lieferzeiten bestellt werden.
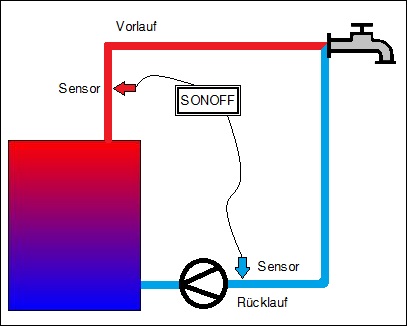
Das Funktionsprinzip:
Die grundlegende Funktionsweise basiert auf der Erfassung eines Temperaturanstiegs an der Entnahmeleitung des Warmwasserspeichers.
Produktlink für eine einfache und effektive Sensorbefestigung
 Der Wasserhahn fungiert hierbei quasi als Fernbedienung.
Der Wasserhahn fungiert hierbei quasi als Fernbedienung.
Wird für einen kurzen Moment Warmwasser entnommen, z.B. beim Zähneputzen. Registriert der Temperaturfühler an der Entnahmeleitung diesen Temperaturanstieg, die Zirkulationspumpe augenblicklich angefordert und läuft für die Zeitdauer der eingestellten Laufzeit.
Schon kurze Zeit später, steht warmes Wasser am Wasserhahn zur Verfügung.
Um eine schnelle Reaktionszeit zu gewährleisten, sollte der Sensor der Entnahmeleitung möglichst nahe am Warmwasserspeicher angebracht werden, damit das System möglichst schnell auf eine Entnahme und den damit verbundenen Temperaturanstieg reagieren kann.
An den ©Sonnoff kann optional ein weiterer DS18B20 Sensor angeschlossen werden, der die Rücklauftemperatur erfasst. Ist ein zweiter Sensor angeschlossen, wird dieser automatisch von der Firmware erkannt und es erscheinen weitere Eingabefelder in den Einstellungen.
Hier kann dann unter anderem die Rücklauftemperatur eingetragen, bei der die Zirkulationspumpe wieder vorzeitig abgeschaltet werden kann.
Wird kurze Zeit nach einer Zirkulationspumenanforderung eine weitere Entnahme erkannt, greift die Wartezeit. Sie verhindert ein mehrmaliges Einschalten nach einer kürzlichen Entnahmen. Da sich bereits heißes Wasser in den Leitungen befindet, dass sich nur langsam wieder abkühlt.
Die Pumpenlaufzeit sowie die Wartezeit nach einer Zirkulation können über entsprechende Parametrierung in den Einstellungen optimal an die Gegebenheiten angepasst werden.
Findet über einen langen Zeitraum keine Entnahme statt, kann es durch das stehende Wasser in den Rohrleitungen zu einer Verkeimungen kommen (Urlaubszeiträume, Wochenendhäuser usw.).
Um einer Verkeimung vorzubeugen und ein Höchstmaß an Hygiene zu gewährleisten, startet nach einer definierbaren Zeitpanne automatisch eine Hygienezirkulation. Diese wird in regelmäßigen Zeitabständen wiederholt, wenn zwischenzeitlich keine Entnahmen stattgefunden haben.
In eine später geplanten Firmware Versionen ist eine vorausschauende Zirkulationsanforderung geplant. Soll diese Funktion genutzt werden, wird der oben beschriebene, zweite DS18B20 Sensor in der Rücklaufleitung benötigt!
Wenn ein regelmäßiges Verbrauchsverhalten erkannt wird, sollen diese Zeiträume erlernt und die Zirkulation bereits im Voraus startet, um unnötigen Wartezeiten zu minimieren. Hingegen soll während längerer Abwesenheit die Vorausschauenden Zirkulationsläufe automatisch unterbunden werden. Mit der ersten Entnahme nach dieser Pause, startet dann die Vorausschauende Zirkulation wieder automatisch. Sollten sich Verbrauchsverhalten geändert haben, sollen die veralteten Informationen automatisch gelöscht und dann nach und nach durch die neu erlernten Informationen ersetzt werden.
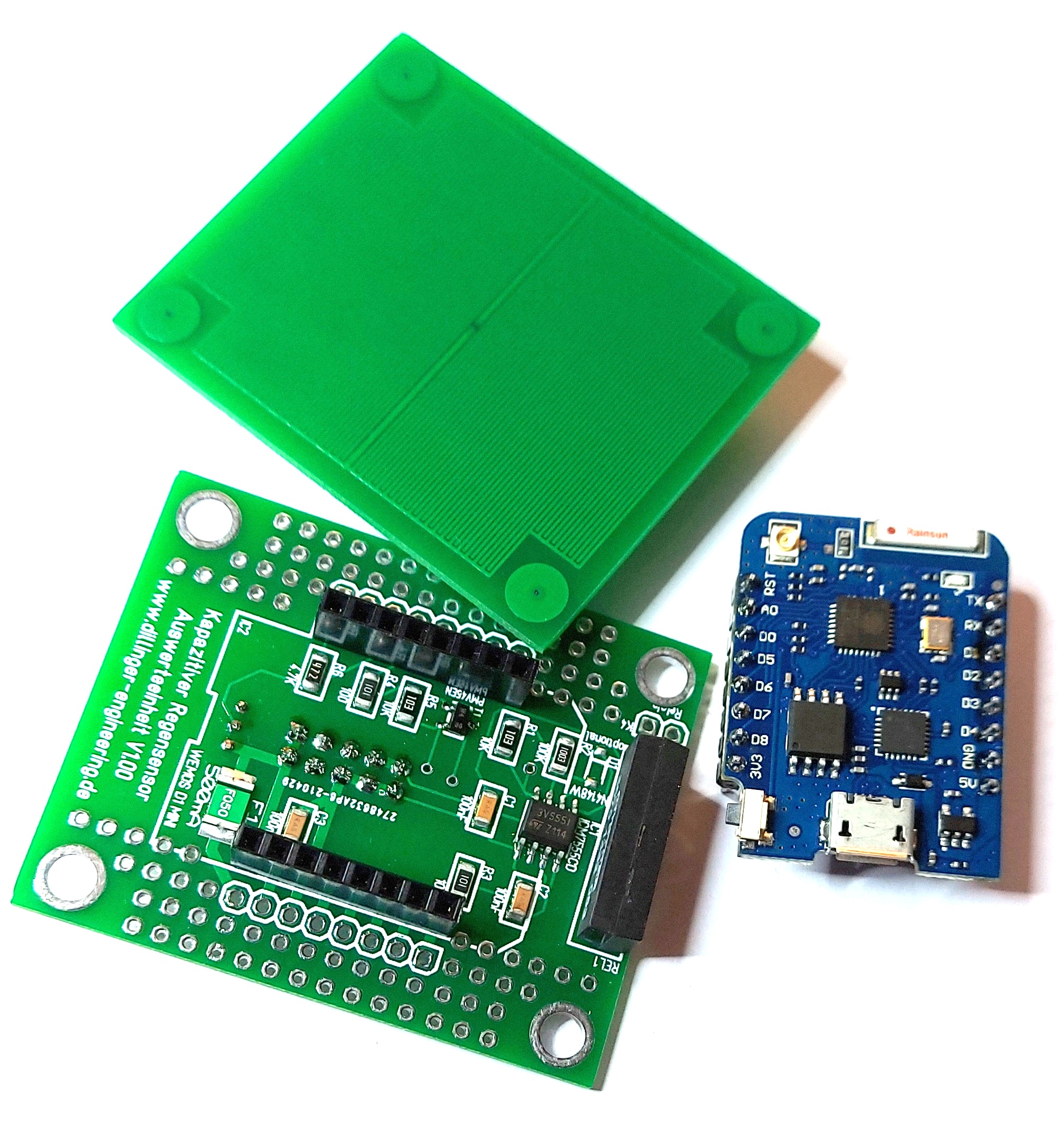
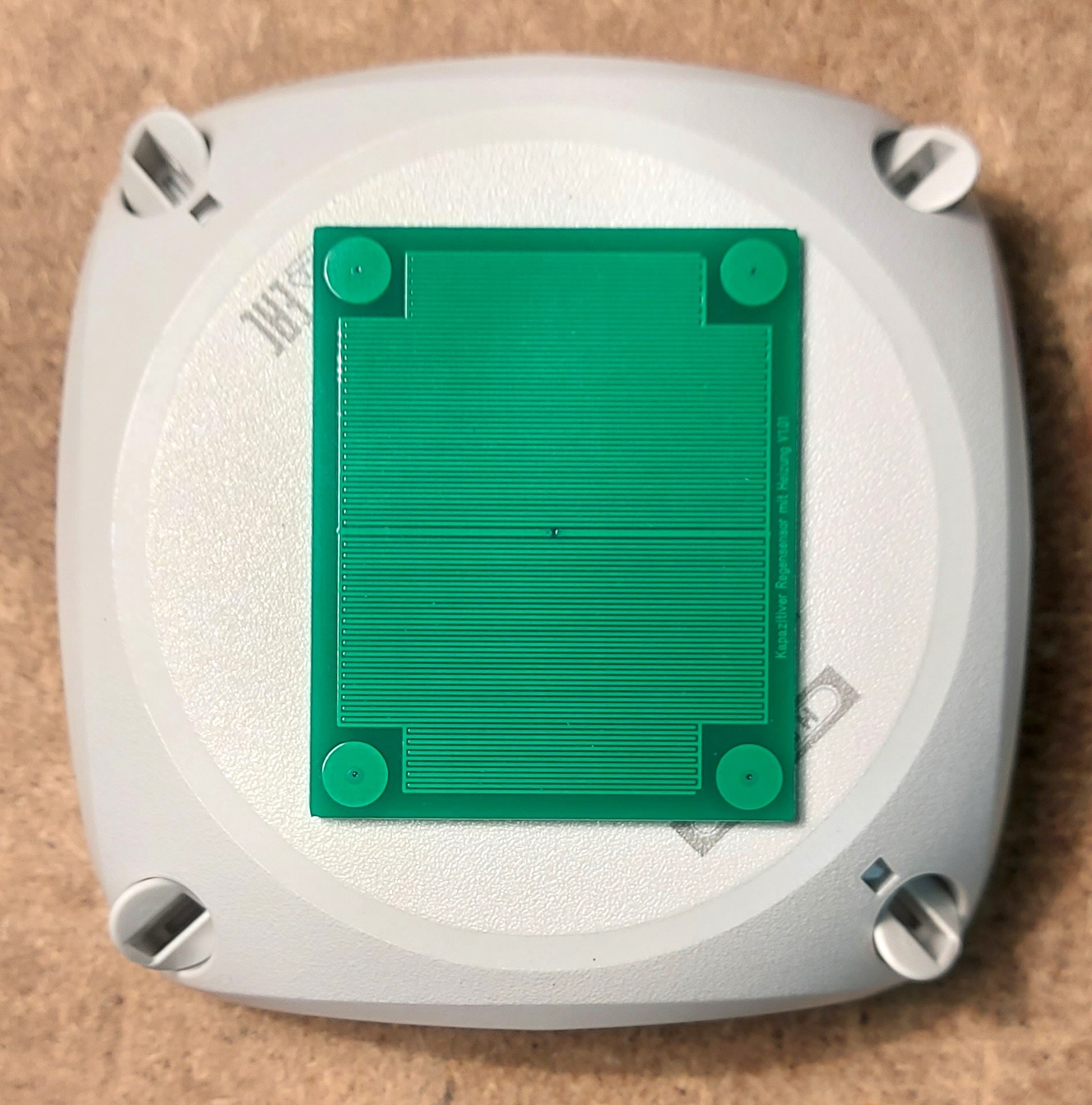
Hardware:
Die Hardware der Zirkulationssteuerung besteht aus einem ©Sonoff TH10/16 mit einem oder optional zwei DS18B20 1-Wire Temperatursensoren. Die beiden Zahlen 10/16 bezieht sich auf die Schaltleistung des Moduls.
Wir raten zum ©Sonoff TH16, er ist kaum teurer als der TH10, bietet jedoch wesentlich mehr Komfort beim Anschluss der Versorgungsspannung und der Pumpe durch seine Klemmanschlüsse. Außerdem bietet er eine ausreichende Reserve bei der Schaltleistung, was die Lebensdauer des Relaisschaltkontaktes ebenfalls wesentlich verlängert.
Die Sensoren werden über eine vier polige 2,5 mm Klinkenbuchse angeschlossen. Über diese Buchse werden zwei GPIO’S und die Versorgungsspannung herausgeführt.
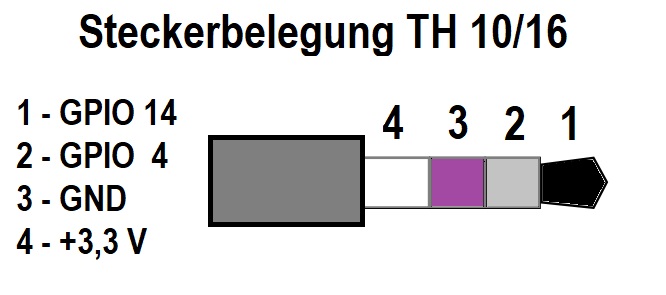
Der Stecker ist ein vierpoliger 2,5mm Klinkenstecker, über den die 1-Wire Temperatursensoren vom Typ DS18B20 mit dem Modul verbunden werden (DQ – GPIO 14, +3,3V und GND). Beim Anschluss von zwei Temperatursensoren, werden diese parallel an die entsprechenden Anschlusspins angeschlossen.
Die Temperatursensoren am Warmwasservorlauf bzw. am Zirkulationsrücklaufrohr, erkennen kleinste Temperaturänderungen und steuern so das Laufverhalten der Zirkulationspumpe.
Da der ©Sonoff nur eine 2,5mm 4-Pin Eingangsbuchse besitzt, gibt es für den Anschluss von zwei Sensor zwei einfach Lösungen. Man schneidet die angespritzten Stecker (soweit vorhanden) ab und verbindet die jeweils gleichen Adern miteinander. Nun kann man entweder einen lötbaren Stecker verwenden, an den die Adern entsprechend der oben beschrieben Anschlussbelegung angelötet werden. Eine Zweite, lötfreie Lösung bietet die Verwendung eines sogenannten Terminal Adapters Klinke 2,5mm 4-Polig mit Schraubklemmen.
Aderfarbcode der DS18B20 Sensoren
DS18B20 Sensoren können zwei Adrig oder auch drei Adrig angeschlossen werden.
Bei einem zweiadrigen Anschluss betreibt man den Sensor im sogenannten parasitären Modus, die benötigte Versorgungsspannung wird über die Sensorleitung eingespeist und über einen kleinen Kondensator im inneren des Sensors gespeichert.


| Signal |
Beschreibung | Klemme des Adapters |
| GND (sw/gn) |
GND | V |
| Data (gelb/weis) |
DQ – GPIO 14 | L |
| VDD (rot) |
+3,3V Versorgungs-spannung | | —– — |
Jeder DS18B20 Temperatursensor besitzt seine eigenen, einzigartigen 64-bit Seriennummer, was den Betrieb mehrere Sensoren an nur einer Datenleitung zu zulässt.
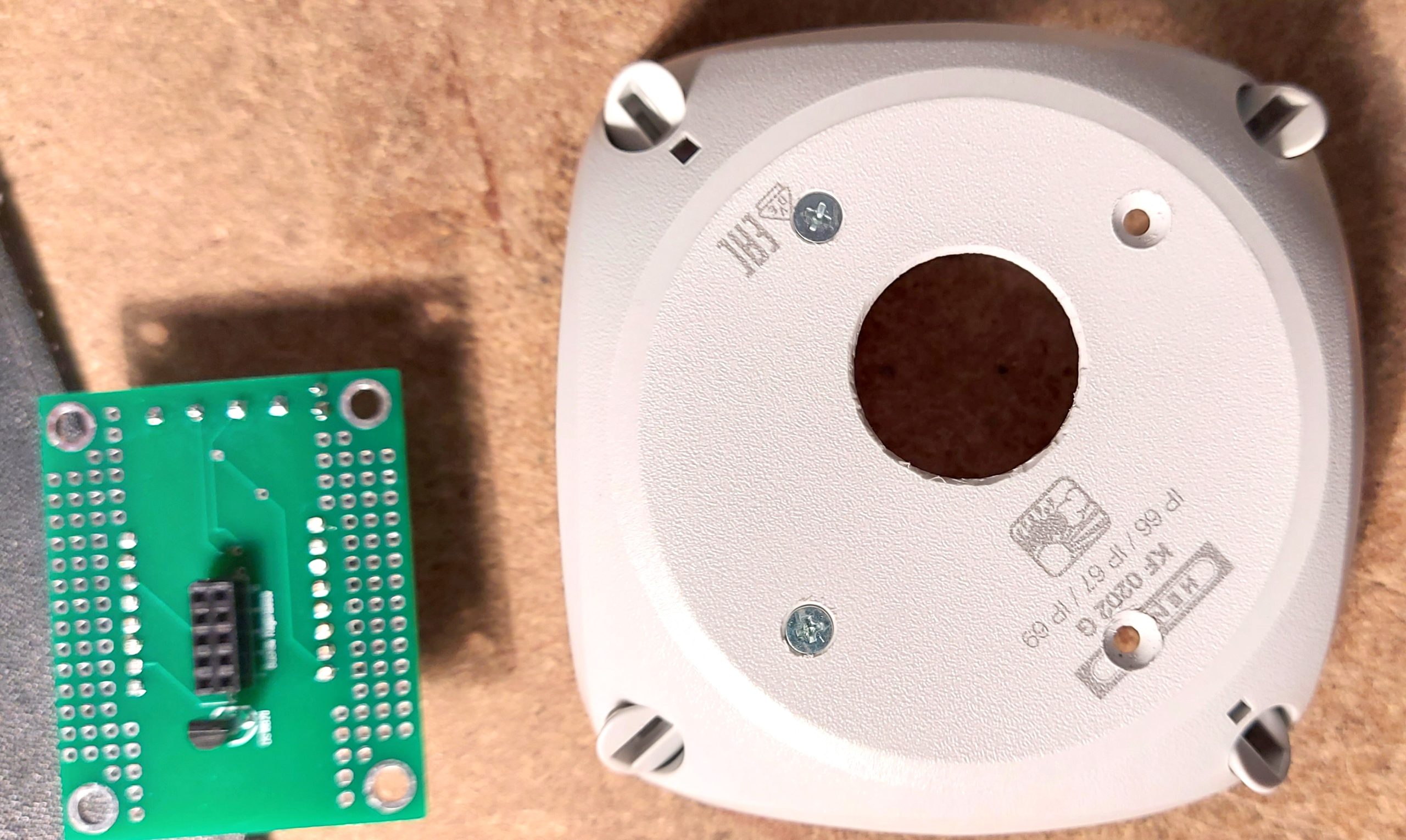
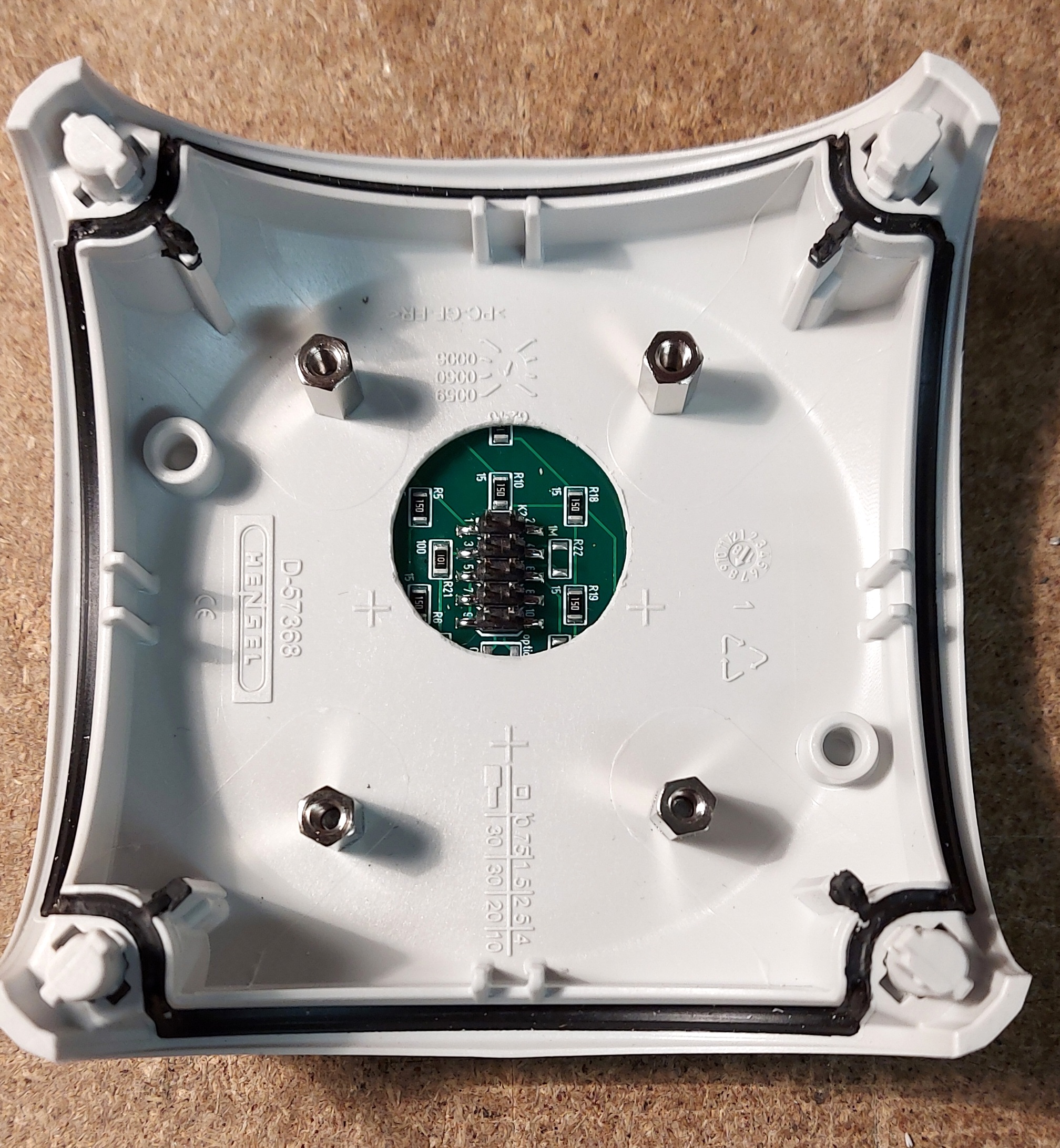
Hardwareanpassung des ©Sonoff
Möchten Sie die Hardware Modifikation und das flashen einer eigenen Firmware selbst vornehmen, wird im folgenden die Vorgehensweise hierfür kurz beschrieben.
Diese Beschreibung soll lediglich eine Hilfestellung geben und erhebt keinen Anspruch auf Vollständigkeit!
Alle selbst durchgeführten Arbeiten erfolgen auf Ihr eigenes Risiko!
An dieser Stelle wird ausdrücklich darauf hingewiesen, dass für alle beschrieben Arbeitsschritte, wie der Austausch des Flashspeichers, die Programmierung einer neuen Firmware, dass ©Sonoff Modul komplett von der 230V Netzspannung getrennt sein muss.
Ansonsten besteht Lebensgefahr durch einen elektrischen Schlag!
Der Flashspeicher, der mit dem das ©Sonoff TH Modul ausgeliefert wird, ist ein Winbond 25Q08FV, der mit einer Größe von 8MBit (1MByte) für diese Anwendung und die „Over the Air“ OTA-Update Fun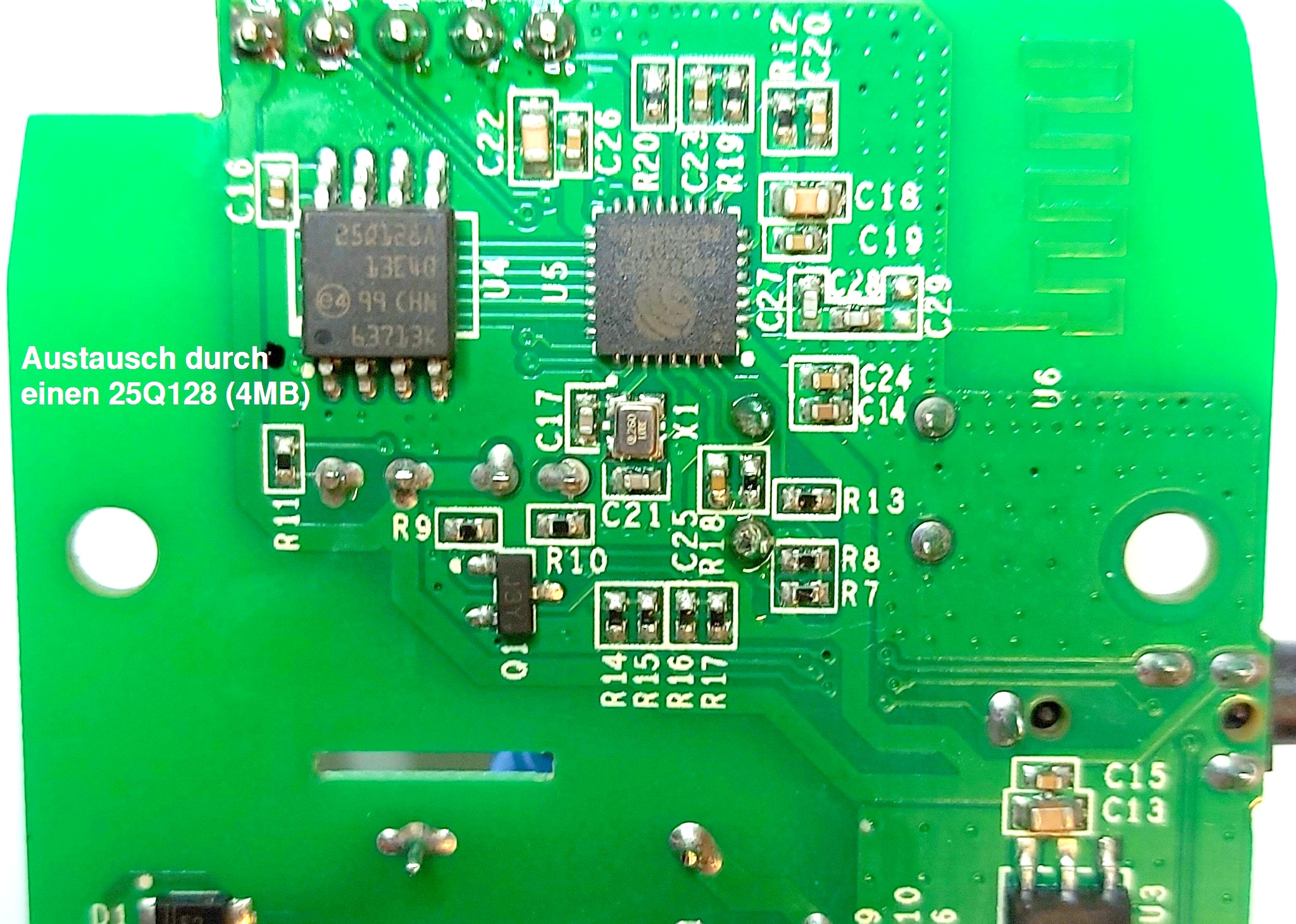 ktion etwas zu knapp bemessen ist. Da bei einem OTA Update die Hälfte des Flash Speichers als Ladespeicher benötigt wird. Deshalb wird er durch einen Winbond 25Q32FV mit 32MBit (4MByte) im SOP-8 Gehäuse ausgetauscht, den Sie in unserem Webshop erhalten.
ktion etwas zu knapp bemessen ist. Da bei einem OTA Update die Hälfte des Flash Speichers als Ladespeicher benötigt wird. Deshalb wird er durch einen Winbond 25Q32FV mit 32MBit (4MByte) im SOP-8 Gehäuse ausgetauscht, den Sie in unserem Webshop erhalten.
Um erstmalig eine eigene Firmware auf dem ©Sonoff zu installieren, sind auf der Platine bereits alle benötigen Pins herausgeführt.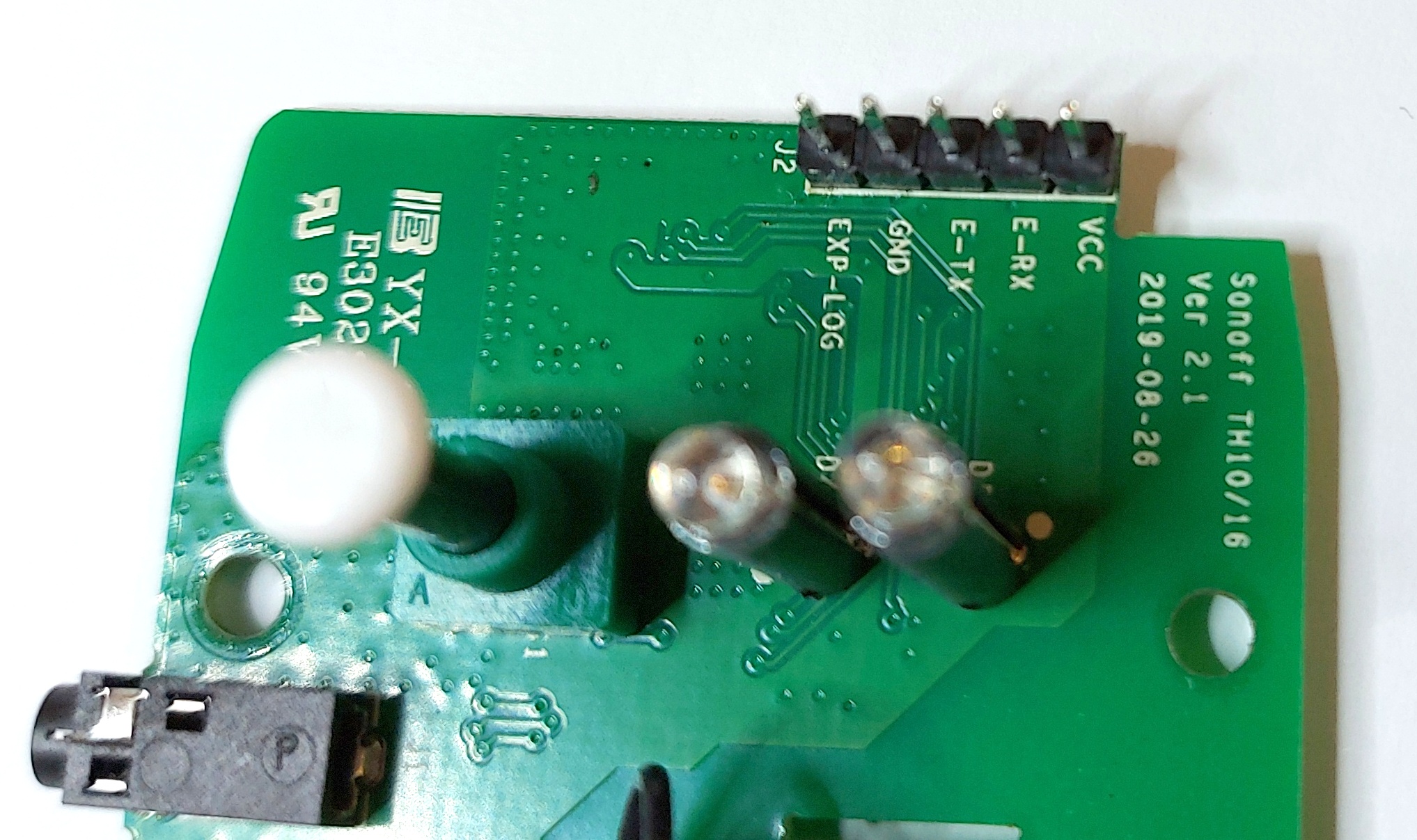
Für den Flashvorgang wir eine USB-Seriell Modul mit einer VSS von 3,3V benötigt. Vor dem Anschluss des Moduls ist auf die richtige Einstellung der Versorgungsspannung zu achten. Bei vielen dieser Module kann die Versorgungsspannung VSS zwischen 3.3V und 5V umgeschaltet werden. Eine zu hohe Versorgungsspannung führt zur sofortigen Zerstörung des ©Sonoff Moduls.
Einrichten der WIFI Verbindung:
Um die Zirkulationssteuerung in das lokale Netzwerk zu integrieren, wird Anfangs ein eigener AP geöffnet. Verbindet man sich mit diesem AP und öffnet anschließend im Webbrowser die IP-Adresse 192.168.4.1 gelangt man in das Konfigurationsportal der Zirkulationssteuerung.
Hier können dann alle notwendigen Einstellungen für das lokale Netzwerk (SSID, Kennwort) und die die Verbindung zum MQTT-Broker (Server IP, Benutzername, Kennwort und Port) vorgenommen werden.
Konnte anschließend mit den eingegebenen Informationen eine Verbindung zum lokalen Netzwerk hergestellt werden, sind alle Daten und Konfigurationen der Steuerung, neben dem MQTT-Broker auch über das integriertes Web-Interface erreichbar.
Einrichten einer Amazon Alexa Verbindung:
Die Zirkulationssteuerung kann über ein Sprach Kommando mit Alexa Geräten ein bzw. ausgeschaltet werden. Wurde die Zirkulationssteuerung mit dem ein Kommando aktiviert, läuft genau wie bei der Entnahmeerkennung die eingestellte Pumpenlaufzeit ab, bevor die Zirkulationspumpe automatisch wieder deaktiviert wird.
Um die Zirkulationssteuerung über Alexa ansteuern zu können, vergeben Sie zuerst den Alexa Invocation (Aufrufnamen) im Webbrowser oder per MQTT. Nach der Eingabe wird die Zirkulationssteuerung neu gestartet und ist bereit für die Kommunikation mit Alexa Geräten.
Stellen Sie vor der Suche von neuen Geräten in ihrer Alexa App sicher, dass ihre Alexa mit dem 2,4 MHz Netzwerk ihres Routers verbunden ist, da vom ESP8266 nur dieses Trägerfrequenz unterstützt wird.
Wählen sie in der Alexa App im Reiter Geräte, Gerät hinzufügen aus. Anschließend suchen sie nach Sonstige Geräte und starten sie die Suche. Nach dem die Zirkulationssteuerung erkannt wurde, kann diese mit den Kommando „Gerätename ein / aus“ angesteuert werden.
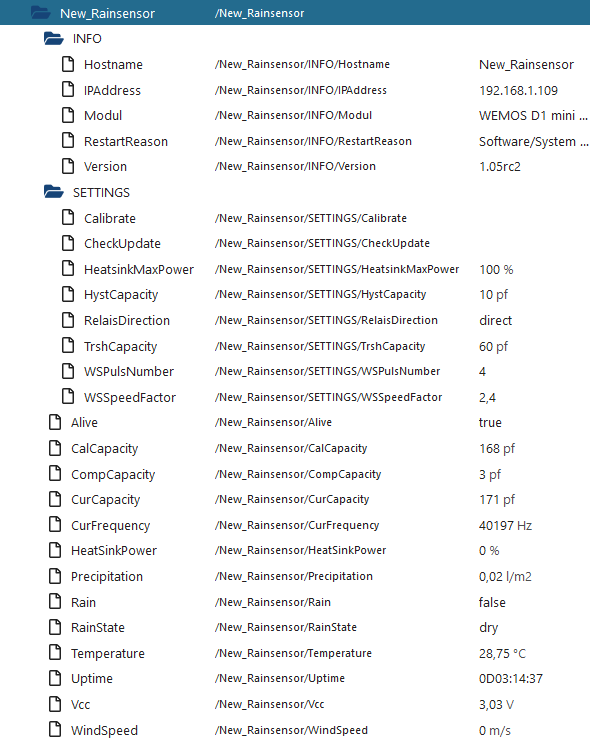
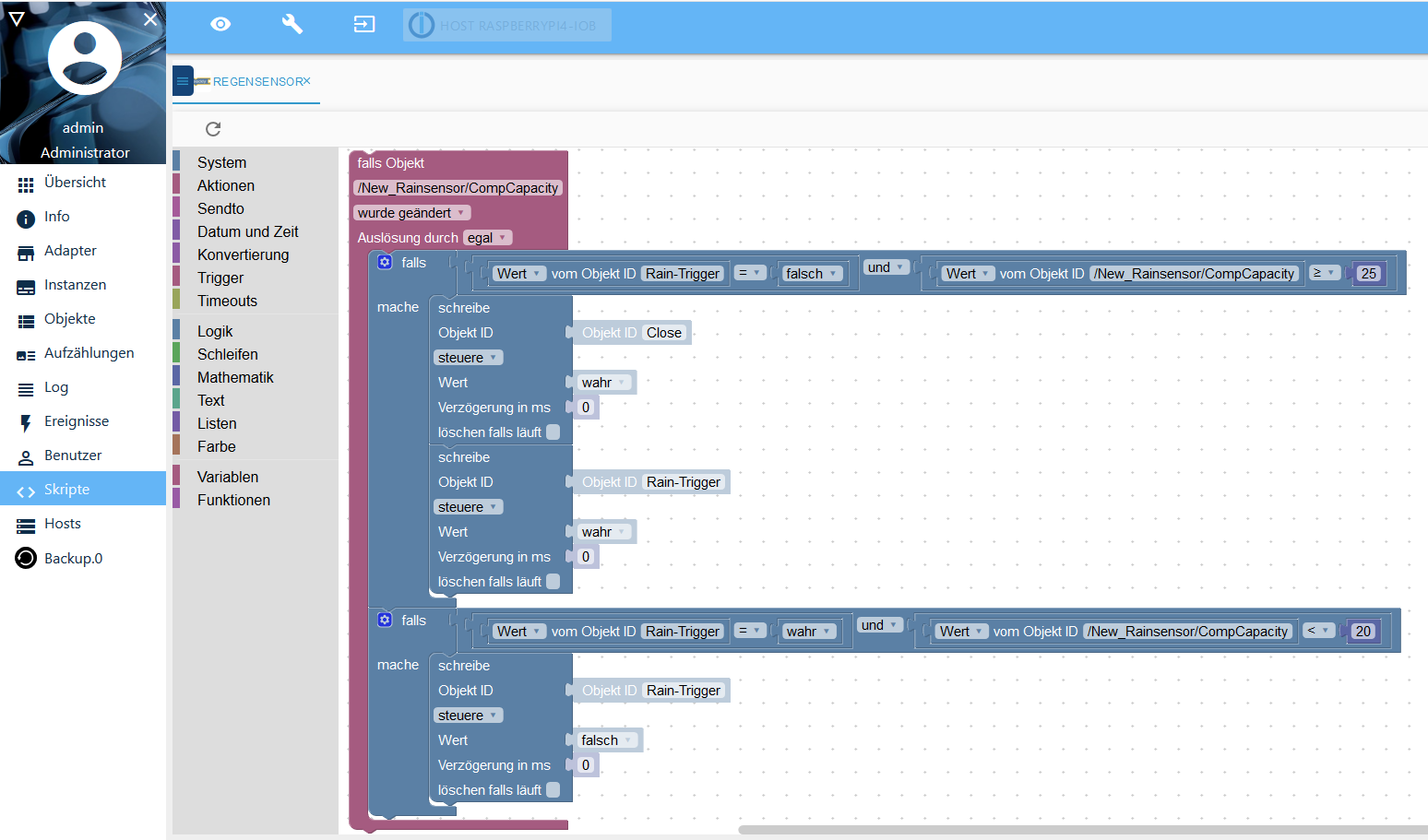
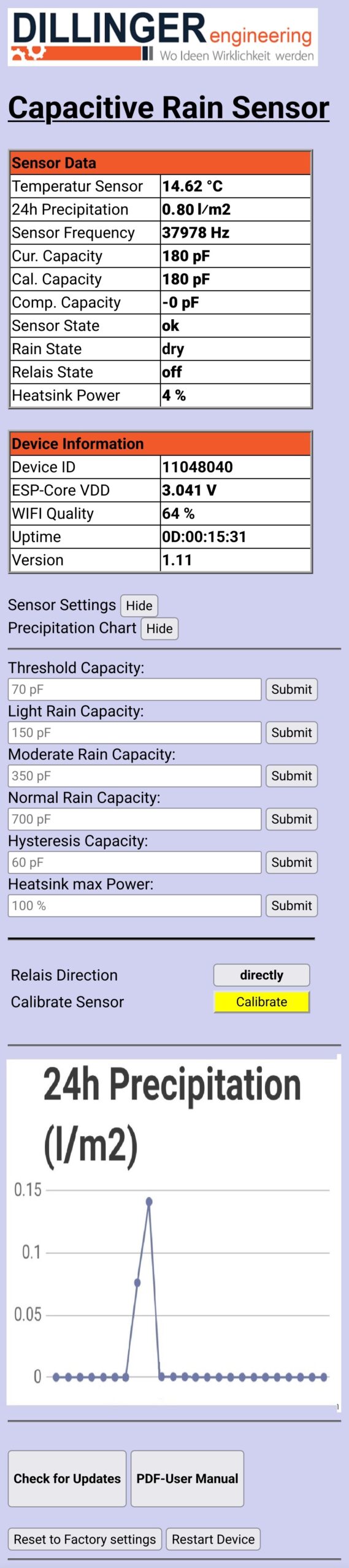
Ansicht im IO-Broker:
Die Ansicht zeigt alle verfügbaren Parameter der Zirkulationssteuerung.
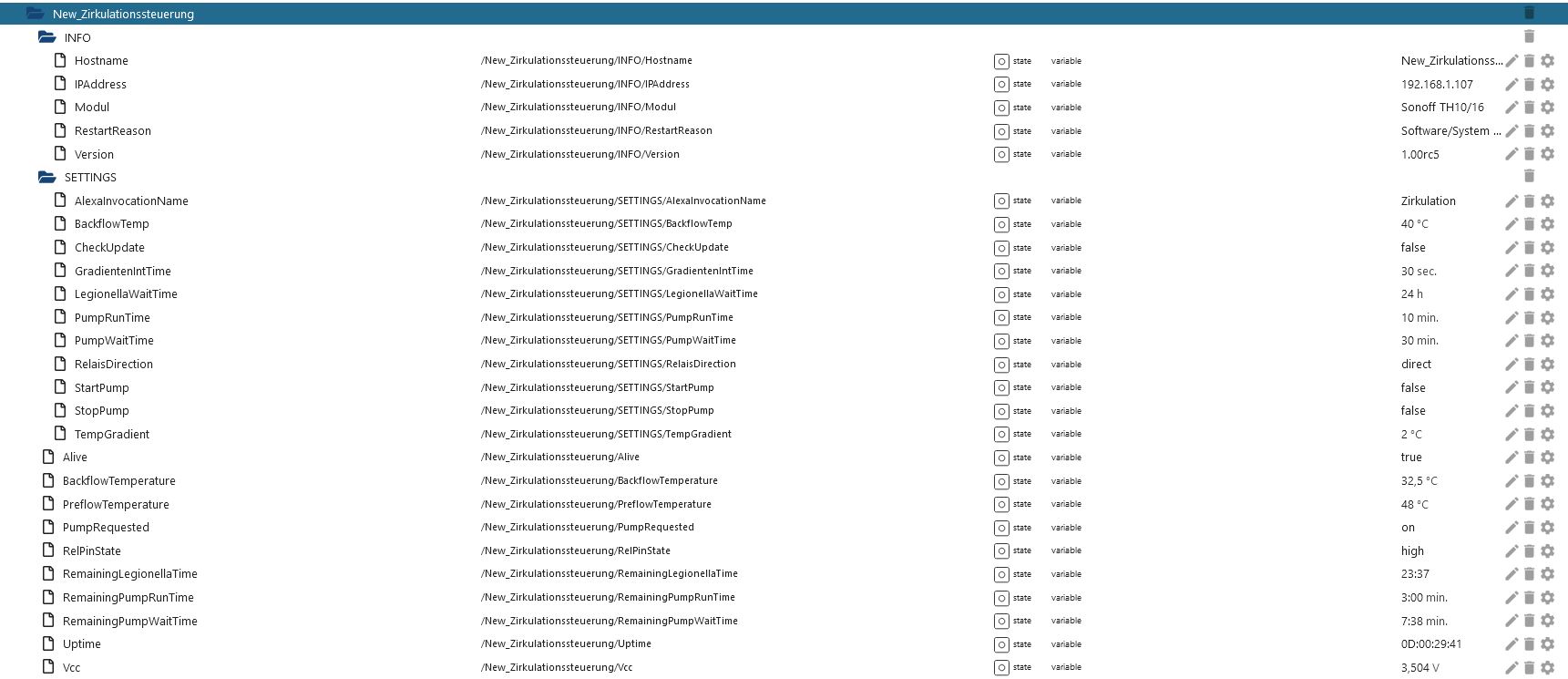
Beschreibung der Notes
| Note Name | Beschreibung | Lesen / Schreiben |
| INFO/Hostname | Bezeichnung des Moduls | Read |
| INFO/Port | Webserver Por | Read |
| INFO/IPAdress | Aktuelle IP-Adresse | Read |
| INFO/Modul | WLAN-Modul | Read |
| INFO/RestartReason | Beschreibung des letzten Neustart Ereignisses | Read |
| INFO/Version | Aktuelle Firmware Version | Read |
| SETTINGS/AlexaInvocationName | Alexa Aufrufname (max. 30 Zeichen) | Read / Write |
| SETTINGS/BackflowTemp | Rücklauftemperatur Abschaltwert (°C) | Read / Write |
| SETTINGS/CHECKUPDATE | Neustes Firmware Update laden (set true) | Read / Write |
| SETTINGS/GradientIntTime | Garatientenzeit ab ersten erkannten Temperaturanstieg (sek.) |
Read / Write |
| SETTINGS/LegionellaWaitTime | Hygienezirkulationszeit (Std.) |
Read / Write |
| SETTINGS/PumpRunTime | Pumpenlaufzeit (min.) | Read / Write |
| SETTINGS/RelaisDirection | Wirkrichtung des Realis | Read / Write |
| SETTINGS/StartPump | Pumpe manuell starten (set true) | Read / Write |
| SETTINGS/StopPump | Pumpe manuell stop (set true) |
Read / Write |
| SETTINGS/TempGradient | Temperaturgradient innerhalb der (°C) GradientIntTime |
Read / Write |
| BackflowTemperatur | Rücklauf Temperatur DS18B20 (°C) | Read |
| PreflowTemperature | Vorlauf Temperatur DS18B20 (°C) | Read |
| PumpRequest | Zirkulationspume aktiv (on/off) |
Read |
| RelPinState | Status Relais Pin (high/low) |
Read |
| RemainingLegionellaTime | Abgelaufene Hygiene Zirkulations Wartezeit (Std.) |
Read |
| RemainingPumpRunTime | Abgelaufene Zirkulationszeit (Min.) |
Read |
| RemainingPumpWaitTime | Abgelaufene Wartezeit (Min.) |
Read |
| Uptime | Zeit seit dem letzten Neustart | Read |
| Vcc | Prozessor Core Spannung | Read |
| WIFI-Quality |
WIFI-Qualität in % | Read |
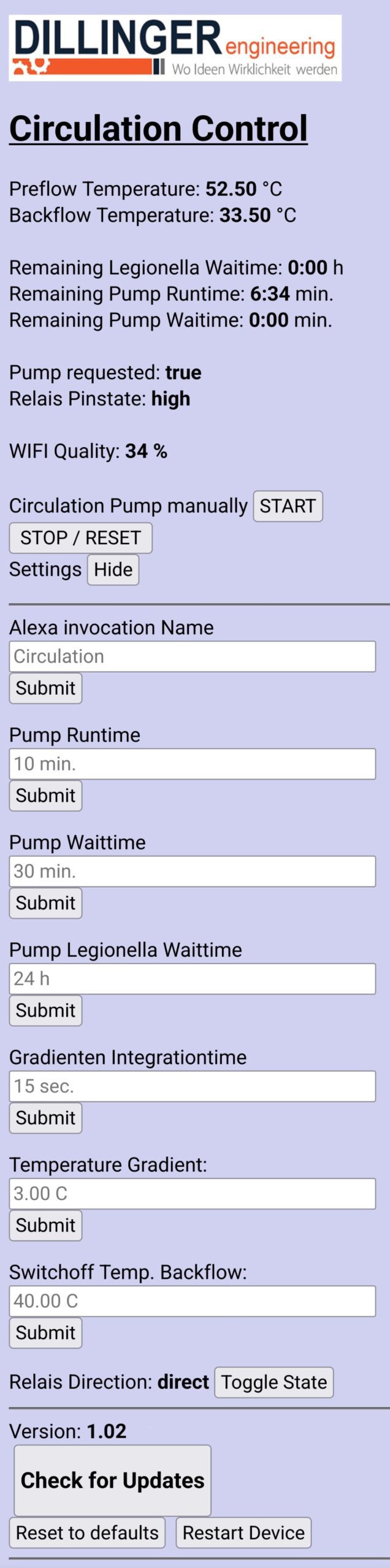
Ansicht im Webbrowser:
Analog zur Ansicht im Broker stehen alle Parameter auch im Webbrowser Interface zur Verfügung.
Aus Sicherheitsgründen wurde eine Anmeldung an der Weboberfläche des Regensensors eingeführt!
Die Standard Anmeldedaten für die Eingabeaufforderung lauten:
Benutzername: admin
Kennwort: Password
Hinweis:
Wird keine Sicherheitsabfrage für die Weboberfläche gewünscht, lassen Sie das Kennwortfeld einfach leer!
Versionsverlauf:
Intended:
- Der Projektsupport wurde eingestellt.
Released:
- 02.08.2022 Version 1.02
WIFI-Quality Anzeige in MQTT und Webinterface eingebaut
Webpage Kennwortabfrage eingebaut, bei leerem Kennwort erfolgt keine Abfrage.
Uptime Fehlerbeseitigung. - 22.04.2022 Version 1.01
Fehlerbeseitigung bei der Übertragung der MQTT Daten. Updates bei der Genauigkeit der Messwerte verbessert.
Bibliotheksupdate durchgeführt, neues Anmeldeportal. - 29.11.2021 Version 1.00
Integration für Ansteuerung mit ©Amazon Alexa