Funktionsparametrierung der am Modul mittels Taster,
per MQTT, Webbrowser und BLYNK App
Potentialfreier Relais Ausgangskontakt zur Ansteuerung des Torantriebs, Eingang für einen zusätzlichen vor Ort Taster
Innovativer Mikrokontroller ESP-07S mit 4 MB Flash
Kompakte Bauform und leichte Montage
WIFI-Manager, Landingportal für die WIFI- und MQTT Konfiguration
Integrierter Web-Server
MQTT-Client Funktion
OTA-Firmware Update
Allgemeines
Ob Sie Ihren vorhandenen Garagentorantrieb smart machen möchten oder nur einen Ersatz für eine verlorene oder defekte original Funkfernbedienung suchen. Haben sie hier eine Lösung gefunden, die beides kann.
Das Modul wird einfach zwischen den vorhandenen Taster (Schlüsselschalter) und den Taster Eingang am bestehenden Garagentorantrieb geschaltet. Hierfür stellt das Modul ebenfalls einen Taster Eingang und einen potentialfreien Relaisausgang zur Toransteuerung zur Verfügung.
Das MQTT-Smarte Garagentor Modul benötigt dann nur noch eine Spannungsversorgung, die über einen mini USB-B Anschluss am Gerät angeschlossen wird. Für die Spannungsversorgung wird ein externes Stecker Netzteil =5V/500 mA Gleichspannung benötigt.
Das Modul stellt neben einem 433 MHz Empfängermodul auch noch weitere Funktionen zur Verfügung. Um es mit dem lokalen WLAN-Netzwerk zu verbinden, wird temporär ein lokaler Access Point geöffnet über den mittels Webbrowser die Konfiguration für die lokale WLAN-Anbindung, die Anbindung an die BLYNK App und einen MQTT-Broker konfiguriert werden kann.
Auf dem Modul befindet sich noch ein Taster und zwei Status Led‘s.
Über den Taster kann eine Vielzahl an Funktionen des Moduls programmiert oder ausgeführt werden. Zwei Status Led’s signalisieren die Betriebs- und Statuszustände des Moduls.
Wurde das Modul nach Vorgaben montiert und in Betrieb genommen, kann mit der eingebauten Ultraschall Höhenstandsmessung neben der Torstellungen auch erkannt werden, ob sich ein Fahrzeug in der Garage befindet. Besitzen ihre Fahrzeuge zudem unterschiedliche Fahrzeughöhen, können anhand dieser unterschiedlichen Bauhöhen sogar noch die einzelnen Fahrzeuge unterschieden werden.
Darüber hinaus verfügt das Modul über eine Temperatur- und Luftfeuchtigkeitsmessung um die Klimatischen Bedingungen im inneren der Garage zu erfassen und auszuwerten.
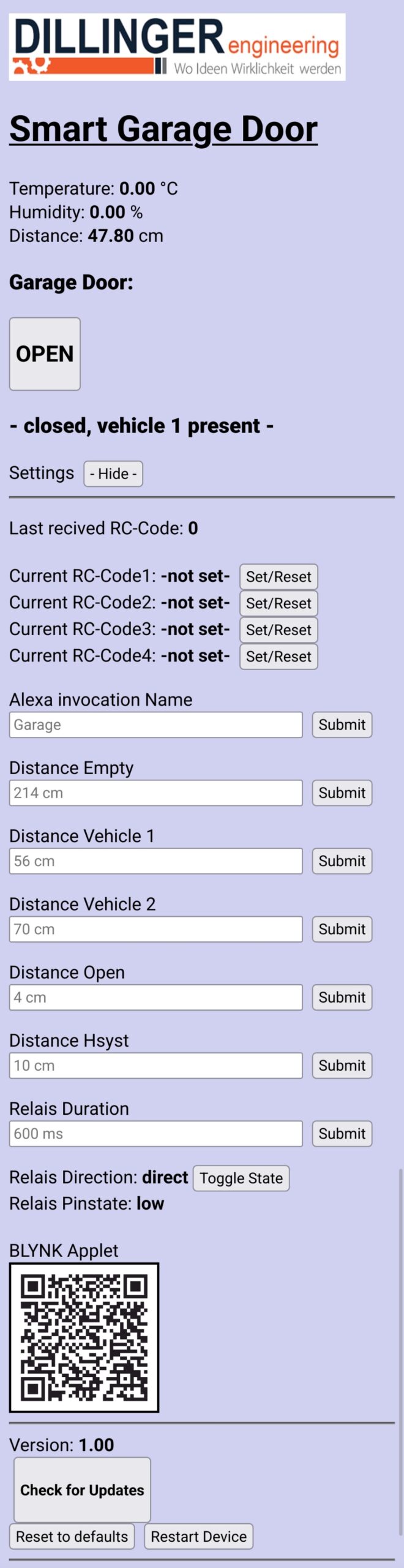
Wurde eine Verbindung zu ihren lokalen WLAN hergestellt, können alle Konfigurations- und Betriebsparameter sowohl über das integrierte Webinterface mit einem Browser, die BLYNK App oder per MQTT konfiguriert, angezeigt und bedient werden.
Die Weboberfläche kann über die lokale IP-Adresse in Ihrem Netzwerk, mit einem Webbrowser aufgerufen werden.
Aus Sicherheitsgründen wurde eine Anmeldung an der Weboberfläche des Regensensors eingeführt!
Die Standard Anmeldedaten für die Eingabeaufforderung lauten:
Benutzername: admin Kennwort: Password
Hinweis: Wird keine Sicherheitsabfrage für die Weboberfläche gewünscht, lassen Sie das Kennwortfeld einfach leer!
Versionsverlauf:
Intended:
Version 1.01
Keine Anfragen
Released:
19.05.2022 Version 1.00
Fertigstellung der Version 1.00
Maximaler Komfort bei der Warmwasserbereitstellung
Minimale Pumpenlaufzeiten, geringer Verschleiß
Optionaler Rücklaufsensor für eine noch bessere Effizienz
Leichte Integration in eine vorhandene Automatisierung durch MQTT-Client Funktion
Weboberfläche zur optimalen Parametrierung auch ohne MQTT
Firmware über OTA-Updates
Allgemeines: Die Zirkulationspumpe in ihrer Trinkwasseranlage sorgt dafür, dass auch an weit entfernten Entnahmestellen jederzeit warmes Wasser zur Verfügung steht, ohne das vorher minutenlang Wasser ungenutzt im Abfluss verschwindet. Dies geschieht durch eine ständige Zirkulation von heißem Wassers zwischen dem Warmwasserspeicher und der letzten Entnahmestelle ihrer Trinkwasseranlage, was letztendlich zu hohe Wärmeverlusten des Warmwasserspeichers führt. Abgesehen von diesen Wärmeverlusten, wird zusätzlich auch ständig elektrischer Energie für den Betrieb der Zirkulationspumpe benötigt, was über die gesamte Lebensdauer der Anlage mit hohen Kosten zu Buche schlägt.
Um diese Verluste möglichst gering zu halten, ist die üblichste und günstigste Lösung, eine einfache Zeitschaltuhr mit Tagesprogramm. Die Zeitschaltuhr wird in den Stromkreis zwischen Steckdose und Zirkulationspupe geschaltet, um außerhalb der üblichen Entnahmezeiträume die Zirkulationspumpe vom Stromnetz zu trennen.
Der Nachteil bei dieser Lösung liegt jedoch darin, dass bei einem anderen Nutzungsverhalten die Pumpe aus ist und kein warmes Wasser zur Verfügung stellt oder die Pumpe läuft zu Zeiten, obwohl gar kein warmes Wasser benötigt wird. In beiden Fällen geht viel Energie verloren und eine komfortable Bereitstellung von warmem Wasser ist nicht gegeben.
Das TH10/16 Modul inklusive eines DS18B20 Temperatursensors kostet kaum mehr als eine elektronische Zeitschaltuhr, bringt aber ein Maximum an Energieeinsparung und das ohne einen Eingriff in die bestehende Hausinstallation vornehmen zu müssen.
Das Modul kann direkt bei Amazon mit kurzen Lieferzeiten bestellt werden.
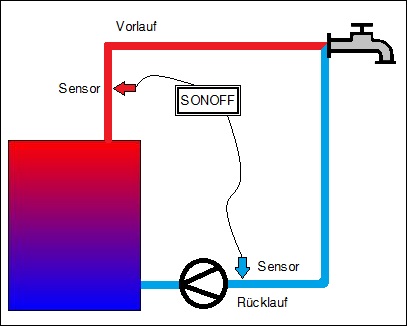
Das Funktionsprinzip: Die grundlegende Funktionsweise basiert auf der Erfassung eines Temperaturanstiegs an der Entnahmeleitung des Warmwasserspeichers.
Wird kurze Zeit nach einer Zirkulationspumenanforderung eine weitere Entnahme erkannt, greift die Wartezeit. Sie verhindert ein mehrmaliges Einschalten nach einer kürzlichen Entnahmen. Da sich bereits heißes Wasser in den Leitungen befindet, dass sich nur langsam wieder abkühlt.
Die Pumpenlaufzeit sowie die Wartezeit nach einer Zirkulation können über entsprechende Parametrierung in den Einstellungen optimal an die Gegebenheiten angepasst werden.
Findet über einen langen Zeitraum keine Entnahme statt, kann es durch das stehende Wasser in den Rohrleitungen zu einer Verkeimungen kommen (Urlaubszeiträume, Wochenendhäuser usw.).
Um einer Verkeimung vorzubeugen und ein Höchstmaß an Hygiene zu gewährleisten, startet nach einer definierbaren Zeitpanne automatisch eine Hygienezirkulation. Diese wird in regelmäßigen Zeitabständen wiederholt, wenn zwischenzeitlich keine Entnahmen stattgefunden haben.
In eine später geplanten Firmware Versionen ist eine vorausschauende Zirkulationsanforderung geplant. Soll diese Funktion genutzt werden, wird der oben beschriebene, zweite DS18B20 Sensor in der Rücklaufleitung benötigt!
Wenn ein regelmäßiges Verbrauchsverhalten erkannt wird, sollen diese Zeiträume erlernt und die Zirkulation bereits im Voraus startet, um unnötigen Wartezeiten zu minimieren. Hingegen soll während längerer Abwesenheit die Vorausschauenden Zirkulationsläufe automatisch unterbunden werden. Mit der ersten Entnahme nach dieser Pause, startet dann die Vorausschauende Zirkulation wieder automatisch. Sollten sich Verbrauchsverhalten geändert haben, sollen die veralteten Informationen automatisch gelöscht und dann nach und nach durch die neu erlernten Informationen ersetzt werden.
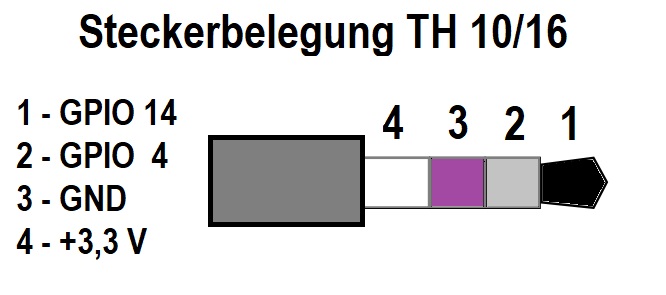
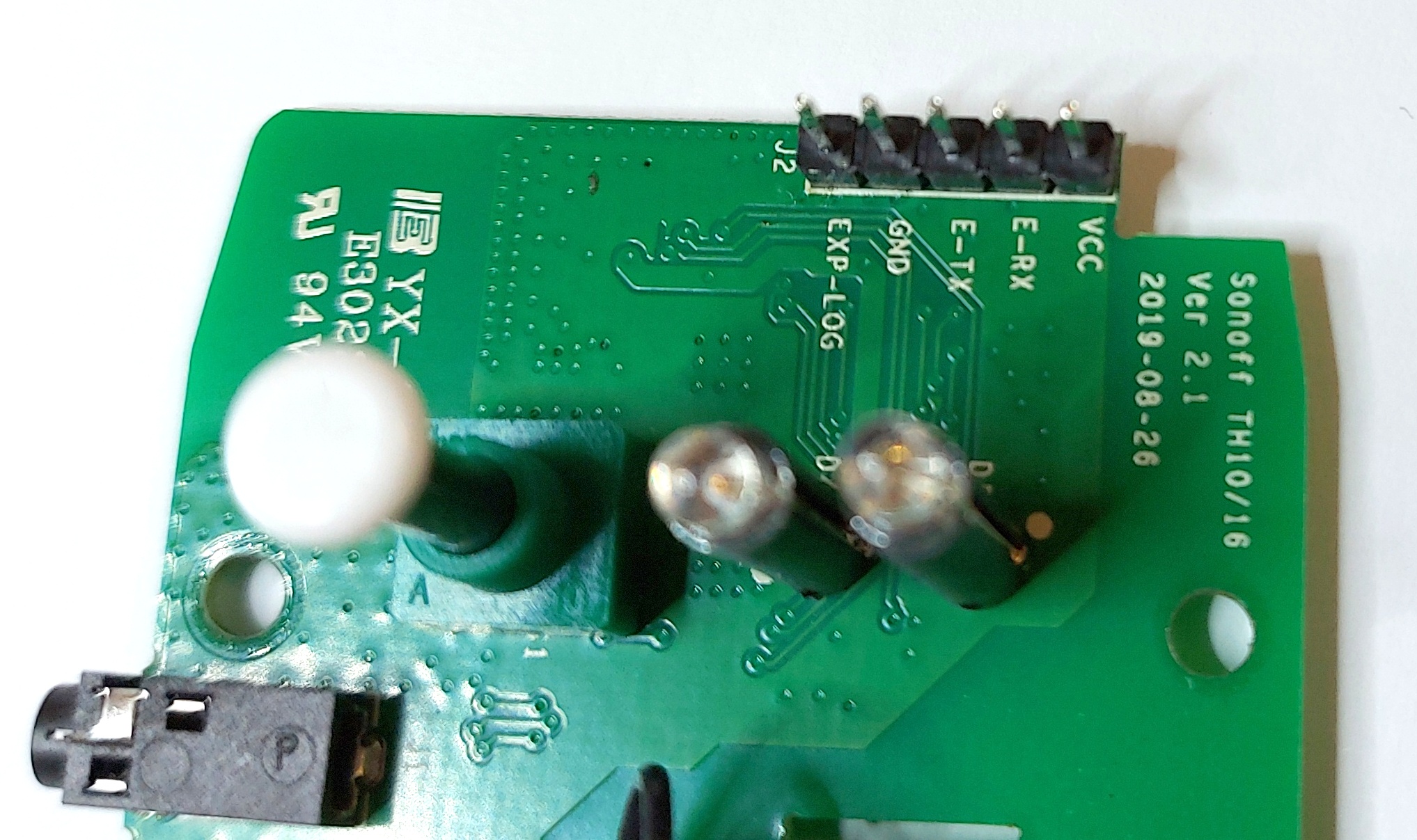
Die Sensoren werden über eine vier polige 2,5 mm Klinkenbuchse angeschlossen. Über diese Buchse werden zwei GPIO’S und die Versorgungsspannung herausgeführt.
Aderfarbcode der DS18B20 Sensoren DS18B20 Sensoren können zwei Adrig oder auch drei Adrig angeschlossen werden.
Bei einem zweiadrigen Anschluss betreibt man den Sensor im sogenannten parasitären Modus, die benötigte Versorgungsspannung wird über die Sensorleitung eingespeist und über einen kleinen Kondensator im inneren des Sensors gespeichert.
Signal
Beschreibung
Klemme des Adapters
GND
(sw/gn)
GND
V
Data
(gelb/weis)
DQ – GPIO 14
L
VDD
(rot)
+3,3V Versorgungs-spannung
| —– —
Jeder DS18B20 Temperatursensor besitzt seine eigenen, einzigartigen 64-bit Seriennummer, was den Betrieb mehrere Sensoren an nur einer Datenleitung zu zulässt.
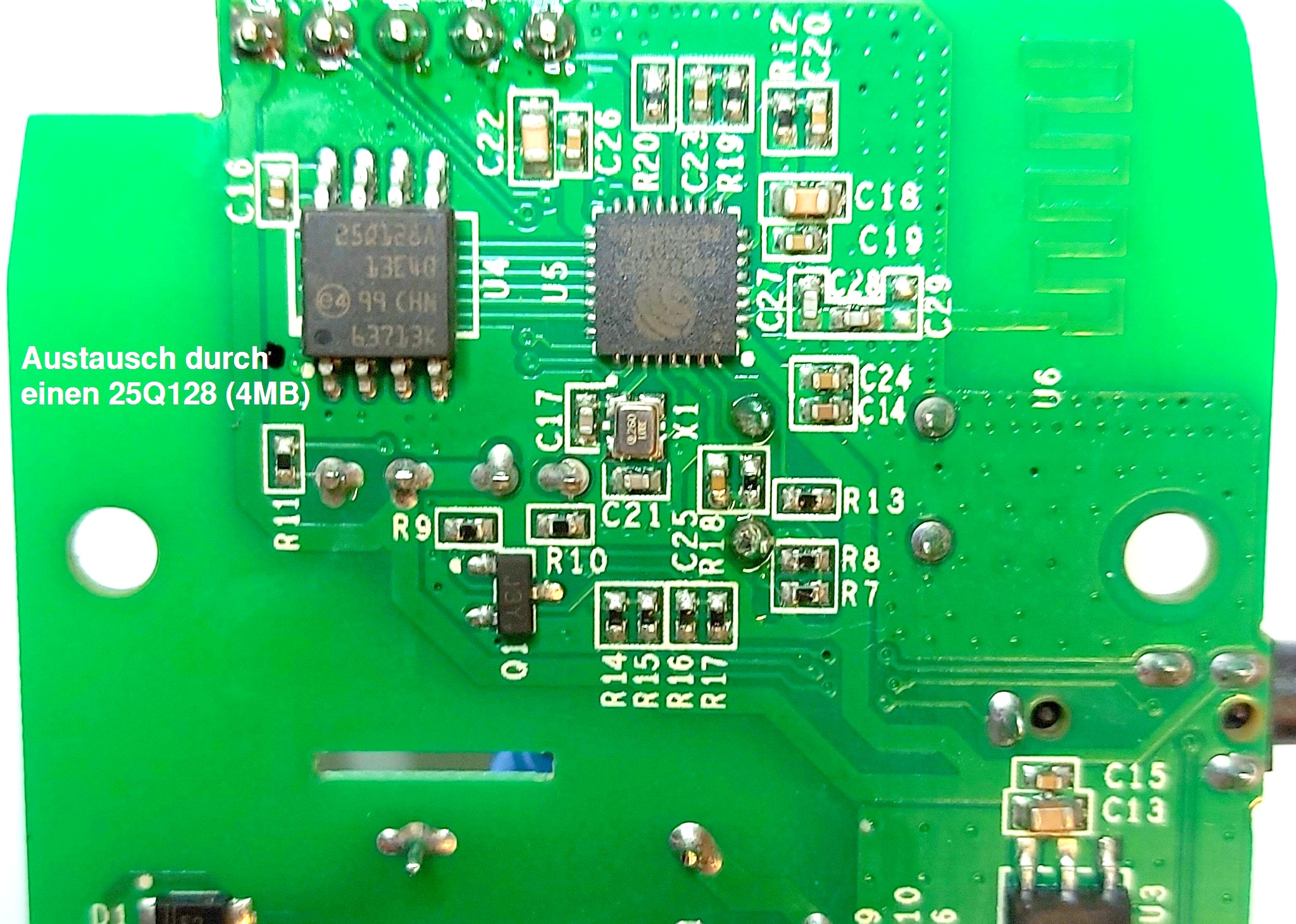
Möchten Sie die Hardware Modifikation und das flashen einer eigenen Firmware selbst vornehmen, wird im folgenden die Vorgehensweise hierfür kurz beschrieben.
Diese Beschreibung soll lediglich eine Hilfestellung geben und erhebt keinen Anspruch auf Vollständigkeit!
Alle selbst durchgeführten Arbeiten erfolgen auf Ihr eigenes Risiko!
Einrichten der WIFI Verbindung: Um die Zirkulationssteuerung in das lokale Netzwerk zu integrieren, wird Anfangs ein eigener AP geöffnet. Verbindet man sich mit diesem AP und öffnet anschließend im Webbrowser die IP-Adresse 192.168.4.1 gelangt man in das Konfigurationsportal der Zirkulationssteuerung.
Hier können dann alle notwendigen Einstellungen für das lokale Netzwerk (SSID, Kennwort) und die die Verbindung zum MQTT-Broker (Server IP, Benutzername, Kennwort und Port) vorgenommen werden.
Konnte anschließend mit den eingegebenen Informationen eine Verbindung zum lokalen Netzwerk hergestellt werden, sind alle Daten und Konfigurationen der Steuerung, neben dem MQTT-Broker auch über das integriertes Web-Interface erreichbar.
Einrichten einer Amazon Alexa Verbindung: Die Zirkulationssteuerung kann über ein Sprach Kommando mit Alexa Geräten ein bzw. ausgeschaltet werden. Wurde die Zirkulationssteuerung mit dem ein Kommando aktiviert, läuft genau wie bei der Entnahmeerkennung die eingestellte Pumpenlaufzeit ab, bevor die Zirkulationspumpe automatisch wieder deaktiviert wird.
Um die Zirkulationssteuerung über Alexa ansteuern zu können, vergeben Sie zuerst den Alexa Invocation (Aufrufnamen) im Webbrowser oder per MQTT. Nach der Eingabe wird die Zirkulationssteuerung neu gestartet und ist bereit für die Kommunikation mit Alexa Geräten.
Stellen Sie vor der Suche von neuen Geräten in ihrer Alexa App sicher, dass ihre Alexa mit dem 2,4 MHz Netzwerk ihres Routers verbunden ist, da vom ESP8266 nur dieses Trägerfrequenz unterstützt wird.
Wählen sie in der Alexa App im Reiter Geräte, Gerät hinzufügen aus. Anschließend suchen sie nach Sonstige Geräte und starten sie die Suche. Nach dem die Zirkulationssteuerung erkannt wurde, kann diese mit den Kommando „Gerätename ein / aus“ angesteuert werden.
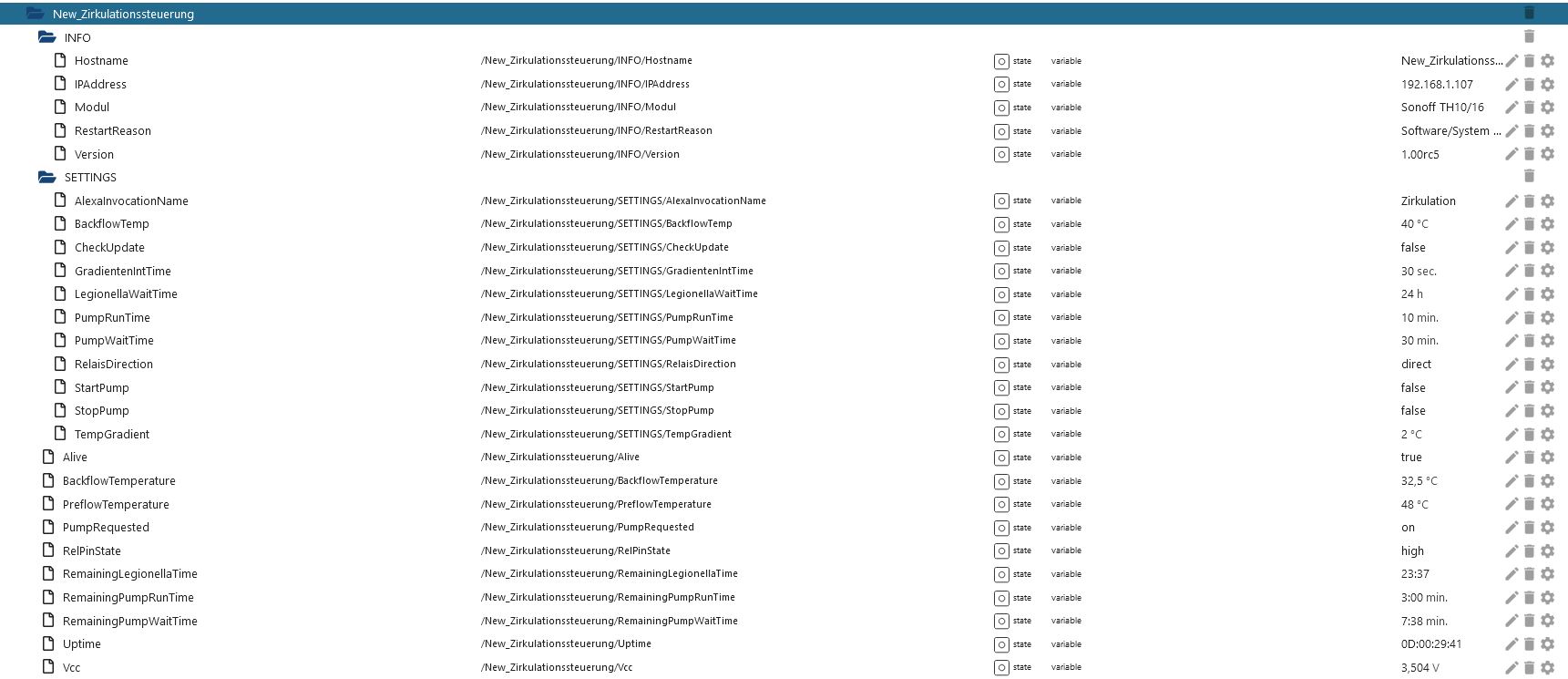
Ansicht im IO-Broker:
Die Ansicht zeigt alle verfügbaren Parameter der Zirkulationssteuerung.
Beschreibung der Notes
Note Name
Beschreibung
Lesen / Schreiben
INFO/Hostname
Bezeichnung des Moduls
Read
INFO/Port
Webserver Por
Read
INFO/IPAdress
Aktuelle IP-Adresse
Read
INFO/Modul
WLAN-Modul
Read
INFO/RestartReason
Beschreibung des letzten Neustart Ereignisses
Read
INFO/Version
Aktuelle Firmware Version
Read
SETTINGS/AlexaInvocationName
Alexa Aufrufname (max. 30 Zeichen)
Read / Write
SETTINGS/BackflowTemp
Rücklauftemperatur Abschaltwert (°C)
Read / Write
SETTINGS/CHECKUPDATE
Neustes Firmware Update laden (set true)
Read / Write
SETTINGS/GradientIntTime
Garatientenzeit ab ersten erkannten Temperaturanstieg
(sek.)
Read / Write
SETTINGS/LegionellaWaitTime
Hygienezirkulationszeit
(Std.)
Read / Write
SETTINGS/PumpRunTime
Pumpenlaufzeit (min.)
Read / Write
SETTINGS/RelaisDirection
Wirkrichtung des Realis
Read / Write
SETTINGS/StartPump
Pumpe manuell starten (set true)
Read / Write
SETTINGS/StopPump
Pumpe manuell stop
(set true)
Read / Write
SETTINGS/TempGradient
Temperaturgradient innerhalb der (°C) GradientIntTime
Read / Write
BackflowTemperatur
Rücklauf Temperatur DS18B20 (°C)
Read
PreflowTemperature
Vorlauf Temperatur DS18B20 (°C)
Read
PumpRequest
Zirkulationspume aktiv
(on/off)
Read
RelPinState
Status Relais Pin
(high/low)
Read
RemainingLegionellaTime
Abgelaufene Hygiene Zirkulations Wartezeit
(Std.)
Read
RemainingPumpRunTime
Abgelaufene Zirkulationszeit
(Min.)
Read
RemainingPumpWaitTime
Abgelaufene Wartezeit
(Min.)
Read
Uptime
Zeit seit dem letzten Neustart
Read
Vcc
Prozessor Core Spannung
Read
WIFI-Quality
WIFI-Qualität in %
Read
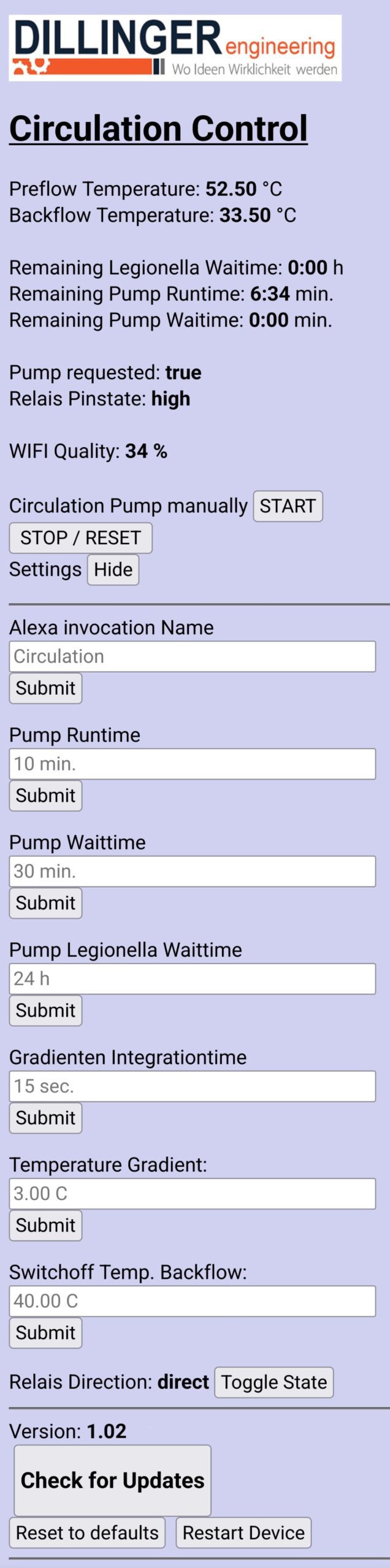
Ansicht im Webbrowser:
Analog zur Ansicht im Broker stehen alle Parameter auch im Webbrowser Interface zur Verfügung.
Aus Sicherheitsgründen wurde eine Anmeldung an der Weboberfläche des Regensensors eingeführt!
Die Standard Anmeldedaten für die Eingabeaufforderung lauten:
Benutzername: admin Kennwort: Password
Hinweis: Wird keine Sicherheitsabfrage für die Weboberfläche gewünscht, lassen Sie das Kennwortfeld einfach leer!
Versionsverlauf:
Intended:
Der Projektsupport wurde eingestellt.
Released:
02.08.2022 Version 1.02
WIFI-Quality Anzeige in MQTT und Webinterface eingebaut
Webpage Kennwortabfrage eingebaut, bei leerem Kennwort erfolgt keine Abfrage.
Uptime Fehlerbeseitigung.
22.04.2022 Version 1.01
Fehlerbeseitigung bei der Übertragung der MQTT Daten. Updates bei der Genauigkeit der Messwerte verbessert.
Bibliotheksupdate durchgeführt, neues Anmeldeportal.
Um die Sende- Empfangsreichweite zu erhöhen, verfügt das WEMOS D1 mini pro Modul über einen externen Antennenanschluß vom Typ MHF-4.
Hier kann eine exteren WIFI-Antenne angeschlossen werden.
Um zwichen der internen Keramikantenne und dem MHF-4 Connector Anschluss umzuschalten, muss der 0 Ohm Widerstand auf dem Modul umgelötet werden (siehe Foto).
Anfang 2021, wurde von uns eine IoT-Wetterstation für eine Projekt in Südtirol entwickelt. Ein Teil der Aufgabenstellung bestand darin, einen kapazitiv arbeitenden Regensensor zu integrieren.
Nach Abschluss der Entwicklung, blieben aus dem Prototyping noch einige der Sensor Platinen übrig, aus denen dieses Projekt entstand.
Um dem interessierten Leser das Funktionsprinzip näher zu bringen und eine Anleitung für den grundlegenden Aufbau eines kapazitiven Regensensors anzubieten, wurde der folgenden Artikel auf meinem Blog dazu veröffentlicht: Kapazitiver Regensensor.
Da das Interesse an diesem Messverfahren sehr groß waren, habe ich mich entschlossen ein kleine Auswerte Platine zu entwickeln, die mit einem ESP8266 (WEMOS D1 mini) ausgestattet ist und die Sensordaten per Webserver und MQTT zur Verfügung stellt.
Zusätzlich wurde auf der Auswerte Platine ein potentialfreier Relais Schaltkontakt vorgesehen, der es erlaubt bei einer Regenerkennung auch direkt einen externen Schaltvorgang auszulösen. Um z.B. eine Markise ein zu fahren.
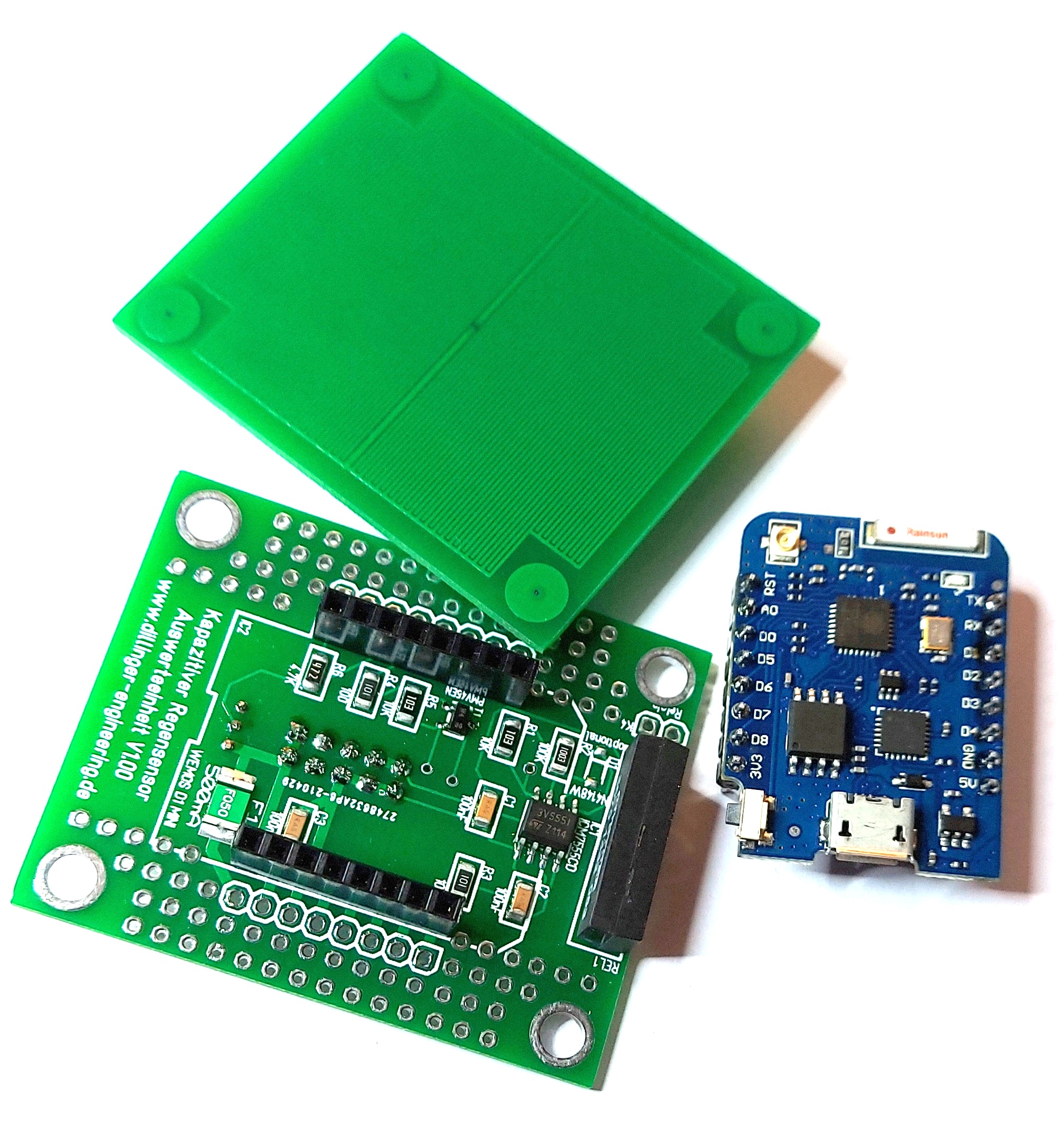
Aufbau Hardware
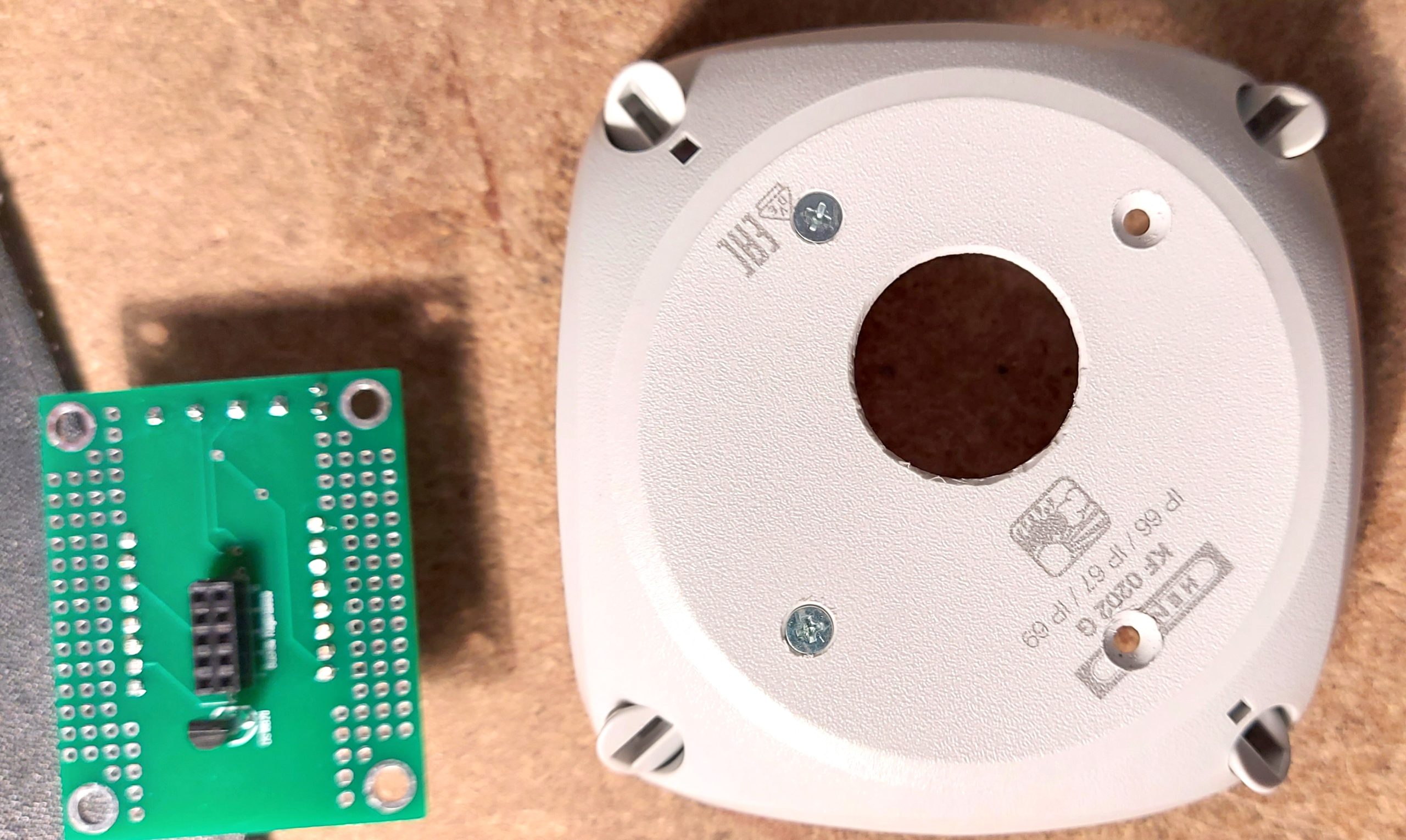
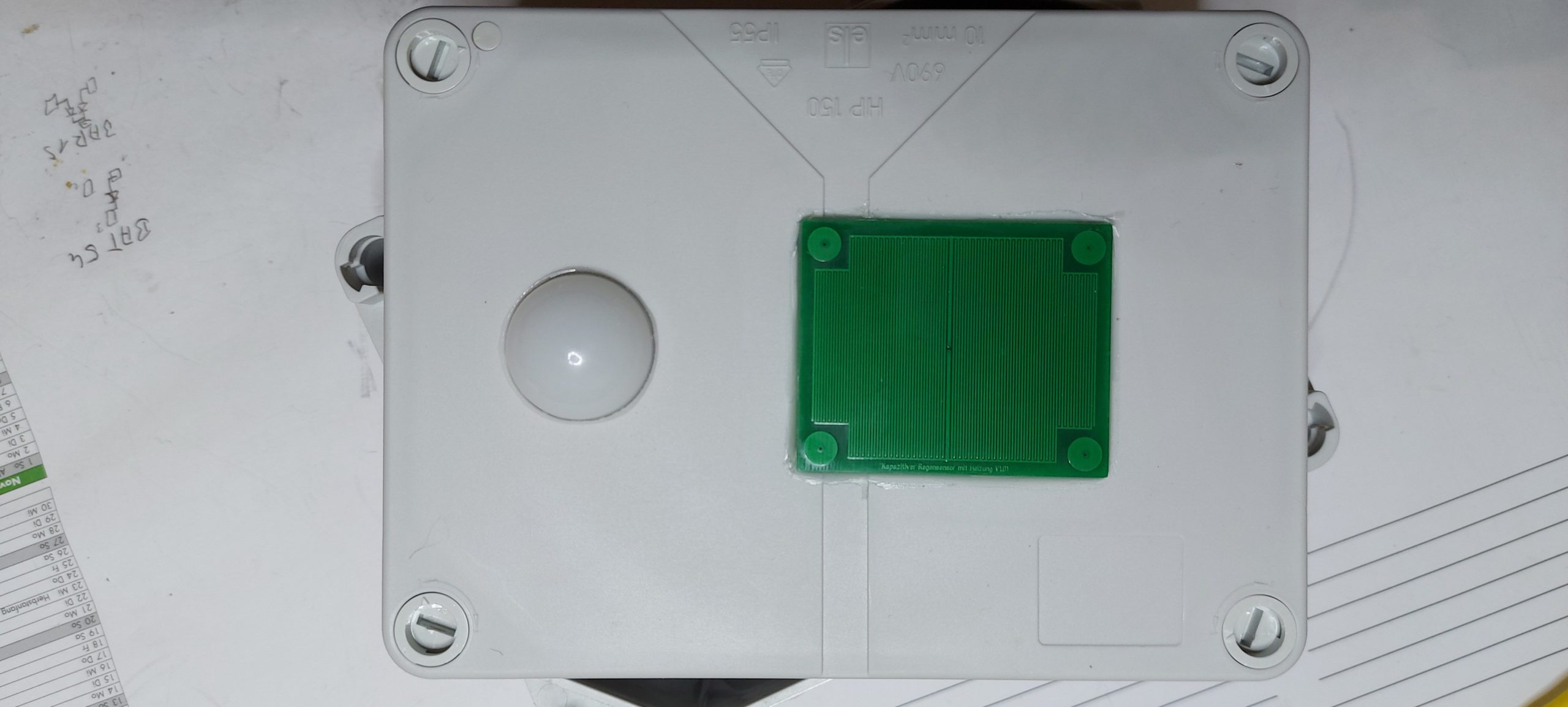
Das Regensensor Modul besteh aus drei Einzel Komponenten
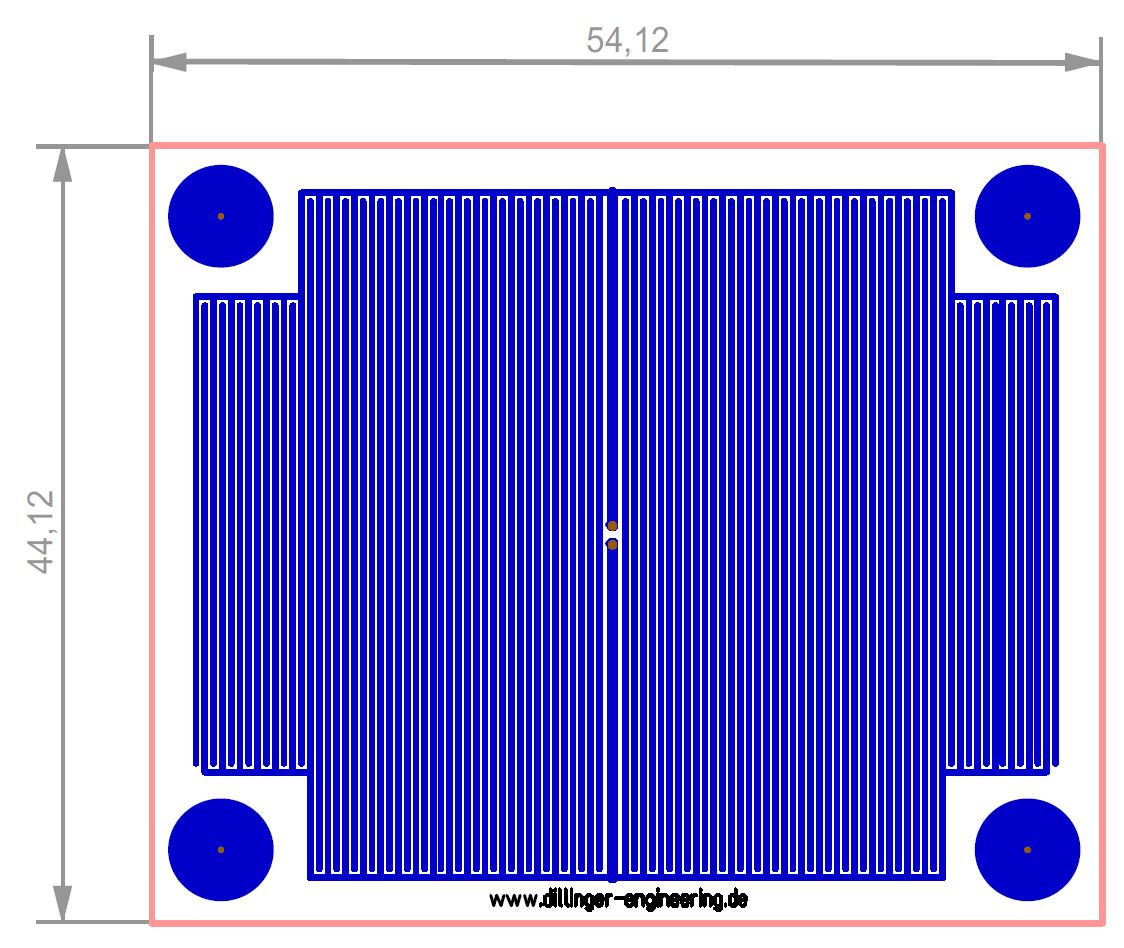
Kapazitive Sensorplatine
Die Funktionsweise der Sensorplatine wird bereits im Beitrag Kapazitiver Regensensor ausführlich beschrieben, weshalb wir hier nicht mehr näher darauf eingehen werden.
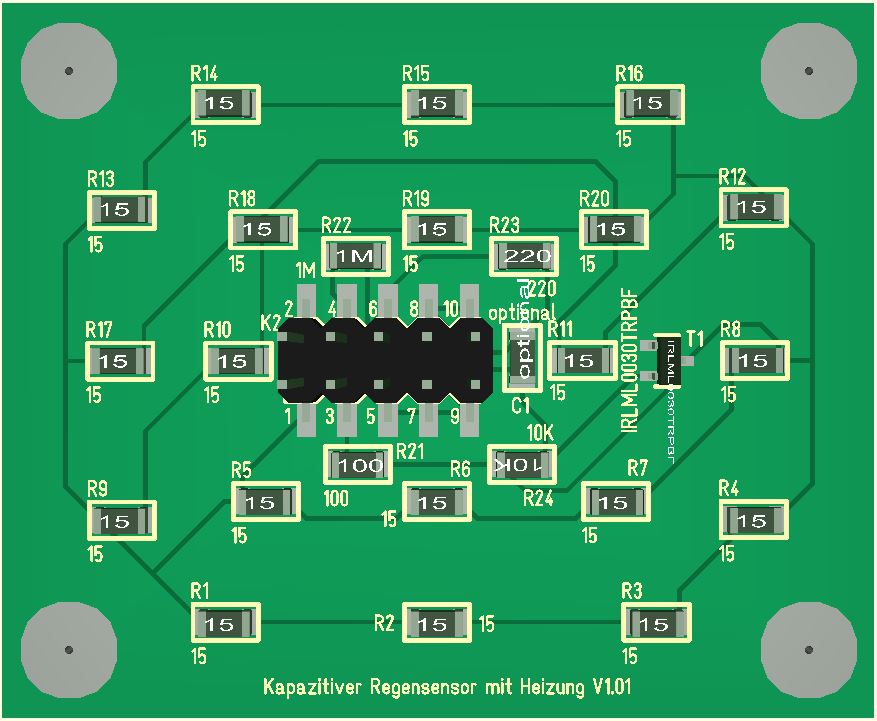
Auswerteeinheit
Die Platine der Auswerteeinheit bildet das Gegenstück zur Sensorplatine. Die beiden Platinen besitzen dieselben Abmessungen, was bei der Befestigung z.B. in einem geeigneten Gehäuse wie einer Verteilerdose von großem Vorteil ist. Die Bohrlöcher für die Befestigung der Auswerteeinheit werden somit komplett von der aufgeklebten Sensorplatine überdeckt und bietet so einen perfekten Korrosionsschutz.
Auf der Platine befindet sich ein DS18B20 Temperatursensor, der durch seine Position die Gehäuseinnentemperatur und gleichzeitig die Temperatur kurz unterhalb der Sensorplatine erfasst. Auf diese Weise kann in den Wintermonaten verhindert werden, dass sich Forst auf dem Sensor bilden kann. Bei einem Regenereignis wird die Sensorheizung ebenfalls automatisch aktiviert, um ein schnelleres Abtrocknen der Sensoroberfläche und somit eine schnellere Reaktionszeit des Sensors nach einem Regenereignisses sicher zu stellen. Die Maximale Sensor Temperatur wird über den Temperatursensor geregelt, das spart Energie und erhöht die Lebensdauer des Regensensors.
Befindet sich kein Feuchtigkeit, Eis oder Kondensat auf der Sensoroberfläche, das durch die Erwärmung verdampfen kann, kommt es auch nicht zu einer Abkühlung durch Verdunstung und der Sensor würde sich immer mehr aufheizen.
Diese Regelung arbeitet mittels PWM (Pulsweitenmodulation), mit einer Frequenz von ca. 100Hz. Wurde Regen detektiert, findet im Temperaturbereich von 35 – 50°C eine stetige Regelung statt.
Unterschreitet die Temperatur 4 °C, wird die Sensor Heizung ebenfalls aktiviert um Frostbildung auf der Sensoroberfläche zu verhindern. Hierbei wird ebenfalls die Leistung der Sensorheizung in Abhängig der gemessenen Temperatur geregelt. Der Regelbereich liegt hier bei zwischen 4°C und -6°C, was dann einer Heizleistung von 100 % entspricht.
Um eine Betauung der Sensoroberfläche zu verhindern, .z.B. bei Morgentau oder Nebelbildung, wird die die kompensierte Sensorkapazität als Messgröße herangezogen. Überschreitet diese einen Wert von 5 pF, wird die Sensorheizung mit einer Leistung von 20 % betrieben, um diesen Effekt zu eliminieren. Die Maximale Sensorheizleistung kann über MQTT oder das Webfrondend in einem Bereich von 1 – 100% eingestellt und somit begrenz werden. Die Spannungsversorgung der Sensorheizung wird über eine 500mA selbstrückstellende Sicherung geschützt. Der WMOS D1 mini besitzt eine eigene selbstrückstellende Sicherung. Die Spannungsversorgung erfolgt nicht über die Micro USB-Buchse, sondern über die zwei auf der Platine herausgeführten Lötpunkte *5V und GND. Nähere Informationen hierzu erhalten Sie in der Dokumentation, die sie oben im Beitrag kostenlos herunterladen können.
ACHTUNG: Auf der Platine ist kein Verpolungsschutz vorhanden! Ein falscher Anschluss der Spannungsversorgung führt zu einer Zerstörung der elektronischen Bauteile. Das Netzteil benötigt eine stabilisierte Ausgangsspannung von 5V= und mindestens 1A Ausgangs Strom, um die Auswerteeinheit und die Sensor Heizung sicher zu betreiben.
Auf der Platine der Auswerteeinheit befindet sich auch noch der hochgenaue Langzeit Timer 7555, der hier als 3V Variante bestückt ist und die Kapazitätsfrequenzumsetzung durchführt. Als letztes Bauteil ist nun noch das Read Relais zu nennen, dass einen potentialfreien Ausgangskontakt zur Verfügung stellt und bei einem Regenereignis ein externes Schaltsignal zur Verfügung stellt.
Der ungenutzte Raum der Platine wurde mit einem 2,54mm Lochraster versehen, das noch genügend Raum für eigenen Erweiterungen und Ideen bietet.
WEMOS D1 mini pro
Das Schaltungsdesigne des WEMOS D1 mini Board der Auswerteeinheit musste ebenfalls modifiziert werden (Nähere Informationen hierzu finden Sie in der Technischen Beschreibung).
Es besitz 4 MB Flash, was ausreichend Platz für zukünftige Erweiterungen oder eigenen Ideeen bereithält. Das Modul wird mit der aktuellen Firmware ausgeliefert, kann aber jeder Zeit über ein Internetverbindung OTA auf die neueste Firmware Versionen upgedatet werden.
Alle Anschlüsse des WEMOS sind nochmals separat auf dem Lochraster (Stiftleiste 2,54mm) herausgeführt.
Aufbau der Firmware
Um das Regensensormodul in das lokale Netzwerk zu integrieren, wird Anfangs ein eigener AP geöffnet. Verbindet man sich mit diesem AP und öffnet man anschließend im Webbrowser die IP-Adresse 192.168.4.1 gelangt man in das Konfigurationsportal des Regensensor Moduls.
Hier können dann alle notwendigen Einstellungen für das lokale Netzwerk (SSID, Kennwort) und die die Verbindung zum MQTT-Broker (Server IP, Benutzername, Kennwort und Port) vorgenommen werden.
Konnte anschließend mit den eingegebenen Informationen eine Verbindung zum lokalen Netzwerk hergestellt werden, sind alle Daten und Konfigurationen des Sensors wie Einschaltschwellen, die Schalthysterese usw. neben dem MQTT-Broker auch über das integriertes Web-Interface erreichbar.
Die Kapazität des Sensors steht als Rohwert vom Sensor zur Verfügung. Für die Auswertung der Schaltschwelle, wird der kompensierte (kalibrierte) Sensorwert herangezogen.
Um nicht mit dem absoluten Kapazitätswert des Sensors arbeiten zu müssen, kann der Sensorwert bei Trockenheit selbst definiert werden. Hierfür wird eine Kalibrierung durchgeführt. So dass der Kompensierte Sensorwert dann bei Trockenwetter null hat.
Wandert der Wert um 10 pF in den negativen Bereich führt das Sensormodul einen automatischen Nullabgleich durch.
Übertragung der Werte per MQTT
Wird der Regensensor neu gestartet, werden alle Topics der Settings subscribed und anschließend alle Topics einmalig published.
Danach wird die publishing Routine in der Firmware fix alle 10 Sekunden aufgerufen und dabei nur die Werte published, die eine Änderung seit dem letzten publishing Zyklus erfahren haben.
Dies geschieht um den Traffic möglichst gering zu halten.
Hier eine Übersicht der benötigten Werteänderung für eine erneute MQTT Übertragung:
curtemperature >= 1.0 °C
curfrequency >= 50.0 Hz
curcapacity >= 3.0 pF
compcapacity >= 3.0 pF
calcapacity >=1.0 pF
precipitation >= 0.01 l/m2
windspeed >= 0.5 m/s
heatsinkpower >= 0.01
rain true/false;
Uptime / Core Vcc >= 0.01 V
Die CurCapacity und damit auch Comp.Cap. schwankt natürlich auch ohne Regen immer ein wenig, abhängig von der Luftfeuchtigkeit, Nebel oder ähnlichem. Deshalb wurde für die Auswertung der Regenerkennung ein Schwellwert definiert.
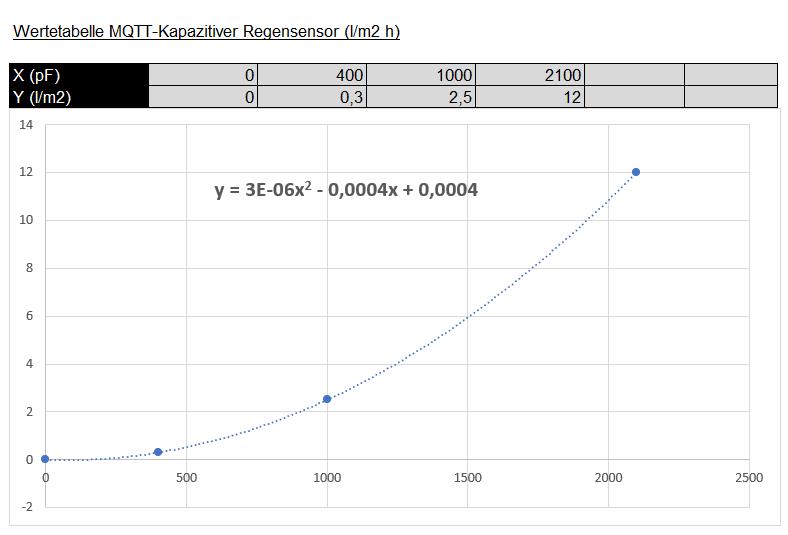
Berechnung der Niederschlagsmenge
Eine neue, aber noch experimentelle Funktion ist eine Berechnung der Niederschlagsmenge anhand der Sensorkapazität und der Dauer des Regenereignisses. Hierfür wird der Wert der kalibrierten Sensorkapazität alle 30 Sekunden erfasst und in ein Array gespeichert.
Nach 15 Minuten, wird aus diesen Werten der Mittelwert gebildet. Die Summe der vier Viertelstundenwerten ergibt dann den Stundenwert, der nach der folgenden Funktion in eine Niederschlagsmenge (l/m2) umgerechnet wird und als 24 Stundenwerte ebenfalls in ein Array mit den Tageswerten geschrieben wird.
Diese Funktion berechnet sich nach der Formel: float y = 3e-06 * sq(x) – 0.0004 * x + 0.0004;
Windgeschwindigkeitsmessung mit einem Anemometer
Ab Version 1.05 besteht die Möglichkeit ein Anemometer für die Ermittlung der Windgeschwindigkeit an die Auswerteeinheit anzuschließen. Der neue Sensor wird nach dem ersten Impuls automatisch von der Firmware erkannt, anschließend werden weitere Konfigurations- und Anzeigewerte per MQTT und im Web Frontend zur Verfügung gestellt.
Das Anemometer muss über einen potentialfreien Ausgangskontakt verfügen (Sensor mit Reed Ausgangskontakt). Die Erweiterung des Auswertemoduls um diese Funktion gestaltet sich recht einfach, es werden lediglich die folgenden Bauteile benötigt.
Ein Widerstand 10 KOhm 1/4 W, print
Ein Keramikkondensator 100 nF, print
Ggf. eine Schraubklemme 2-polig, Raster 5,08 mm für den Sensoranschluss.
Das folgende Bild zeigt die einfache Schaltung, die für den Anschluss eines Anemometers an der Auswerteeinheit nachgerüstet werden muss. Die beiden Verbindungsleitungen des Anemometers werden einmal mit den 3.3V und dem GPIO 14 (D5) des WEMOS D1 mini verbunden. Am GPIO14 (D5) wird dann nur noch der Widerstand (10K) und der Keramikkondensator (100nF) gegen Masse angeschlossen.
Es werden viele verschieden Anemometer mit Reed Schaltkontakten im Handel angeboten. Diese unterscheiden sich nicht nur durch verschieden Bauformen (Diameter) sondern auch durch die Anzahl der Impulse pro Umdrehung.
Deshalb stehen nach dem Anschluss eines Anemometers zwei weitere Eingabeparameter im MQTT-Broker und dem Web Frontend zur Verfügung, die eine individuelle Konfiguration des eingesetzten Anemometers zulassen. Der erste Parameter gibt die Anzahl der Impulse pro Umdrehung an. Wieviel Impulse pro Umdrehung der Sensor liefert, kann leicht mit einem einfachen Multimeter oder einem Durchgangsprüfer ermittelt werden, indem man das Windrad einmal um seine eigene Achse dreht und das Schließen des Kontaktes abzählt.
Der zweite Parameter gibt die Windgeschwindigkeit in km/h, wenn sich das Windrad innerhalb einer Sekunde einmal um die eigene Achse dreht. Lesen Sie hierfür in den Angaben des Herstellers nach.
Verwendet werden kann z.B. ein Anemometer der Firma TOOGOO mit der Typenbezeichnung „WH-SP-WS01Anemometer“.
Für dieses Anemometer sind die Konfigurationseinstellungen bereits in der Firmware eingetragen.
Pulse/Umdrehung = 1 Puls
Geschwindigkeit in km/h bei 1U/s = 2,4 km/h
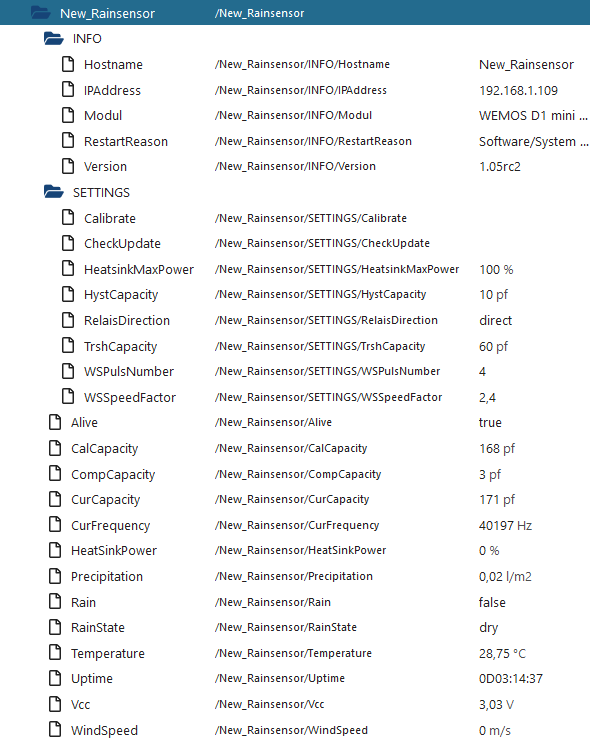
Ansicht im IO-Broker:
Die Ansicht zeigt alle verfügbaren Parameter des Sensormoduls.
Beschreibung der Notes
Note Name
Beschreibung
Lesen / Schreiben
INFO/Hostname
Bezeichnung des Moduls
Read
INFO/IPAdress
Aktuelle IP-Adresse
Read
INFO/Modul
WLAN-Modul
Read
INFO/Port
Webserver Port
Read
INFO/RestartReason
Beschreibung des letzten Neustart Ereignisses
Read
INFO/Device ID
Geräte ID
Read
INFO/Version
Aktuelle Firmware Version
Read
SETTINGS/Calibrate
Sensorkalibrierung (set true)
Read / Write
SETTINGS/CheckUpdate
Neustes Firmware Update laden (set true)
Read / Write
SETTINGS/HeatsinkMaxPower (ab Version x.04)
Maximale Sensor Heizleistung (%)
Read / Write
SETTINGS/HystCapacity
Schalthysterese Kapazitätswert (pF)
Read / Write
SETTINGS/LightRain
Schaltschwelle für die Textanzeige Light Rain (pF)
Read / Write
SETTINGS/ModerateRain
Schaltschwelle für die Textanzeige Moderate Rain (pF)
Read / Write
SETTINGS/ModerateRain
Schaltschwelle für die Textanzeige Normal Rain (pF)
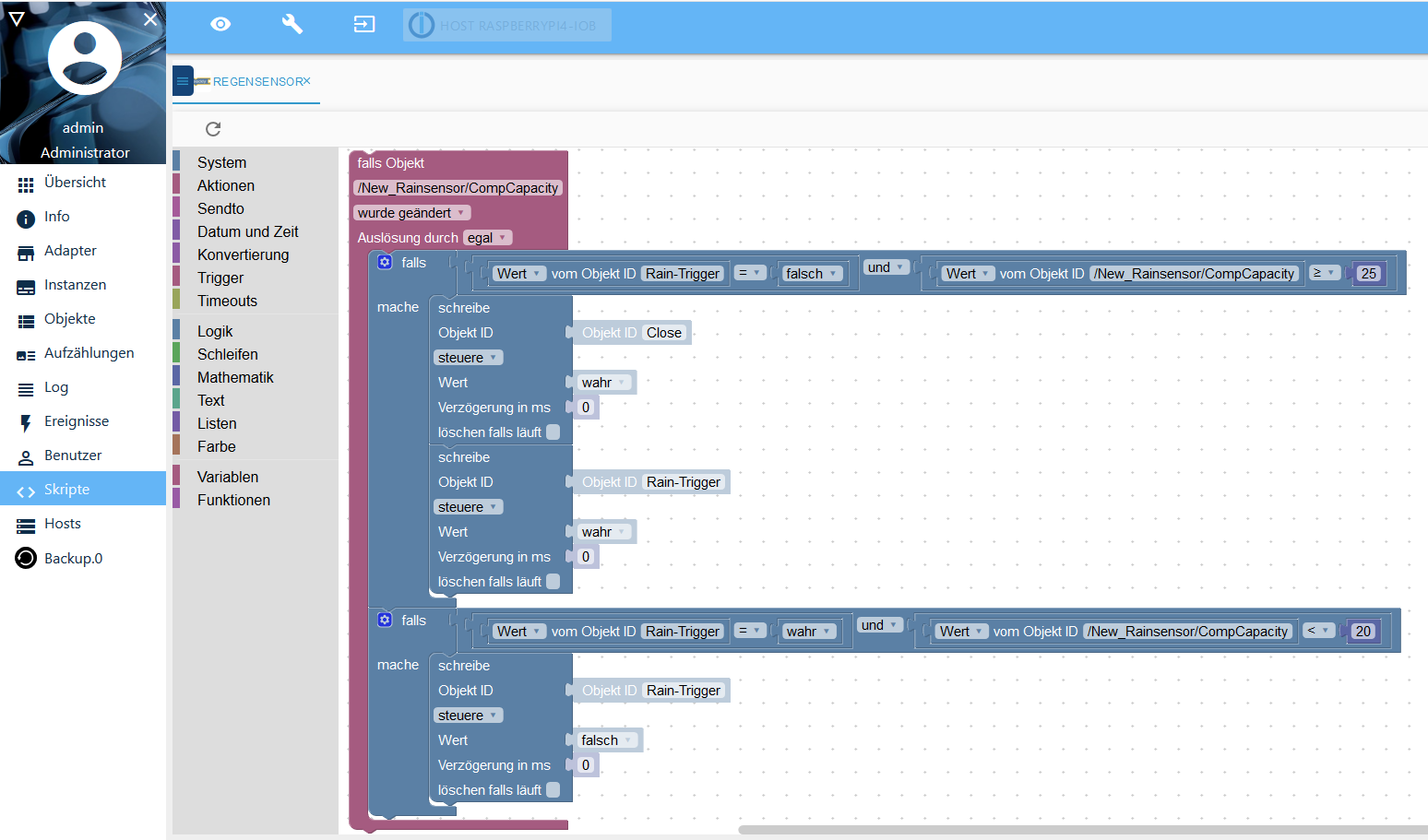
In diesem Abschnitt soll Beispielhaft die Integration einer Markisen Ansteuerung mit einem Blockly Skript für den IO-Broker gezeigt werden.
Die Variable „Rain-Trigger“ ist eine User definierte boolesche Variable im Broker und dient hier als Trigger für das Umschalten zwischen den Zuständen der Regenerkennung und der Regenende Erkennung.
In diesem Skript wird bei einer Regenerkennung ein kurzer „Close“ Befehl an einen Shelly 2.5 Rollladenschalter gesendet, eine Bedienung durch den Nutzer bleibt somit jederzeit weiterhin möglich.
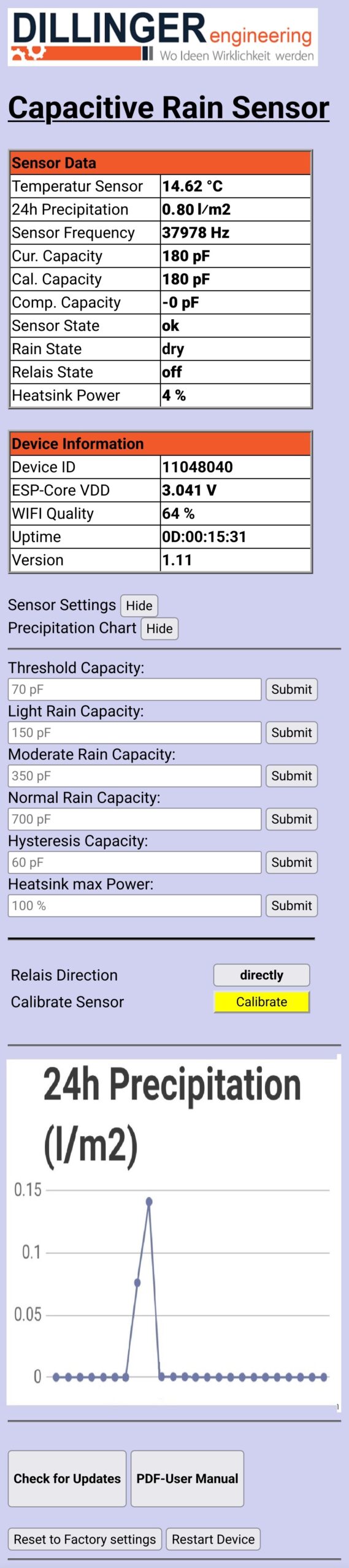
Ansicht im Webbrowser:
Analog zur Ansicht im Broker stehen alle Parameter auch im Webbrowser Interface zur Verfügung.
Ab Firmware Version x.08 wurde aus Sicherheitsgründen eine Anmeldung am Webinterface eingeführt!
Die Standard Anmeldedaten für die Eingabeaufforderung lauten:
Benutzername: admin Kennwort: Password
Hinweis: Wird keine Sicherheitsabfrage für die Weboberfläche gewünscht, lassen Sie das Kennwortfeld einfach leer!
Montage Vorschlag:
Das Regensensor Modul sollte nach Westen ausgerichtet in einem Winkel von ca. 30° montiert werden, damit der auftreffende Regen die Sensoroberfläche nur benetzt und abfließen kann.
Die Ausrichtung nach Norde schützt die Sensoroberfläche vor direkter Sonneneinstrahlung, was die Lebensdauer der Lackschicht enorm verlängert!
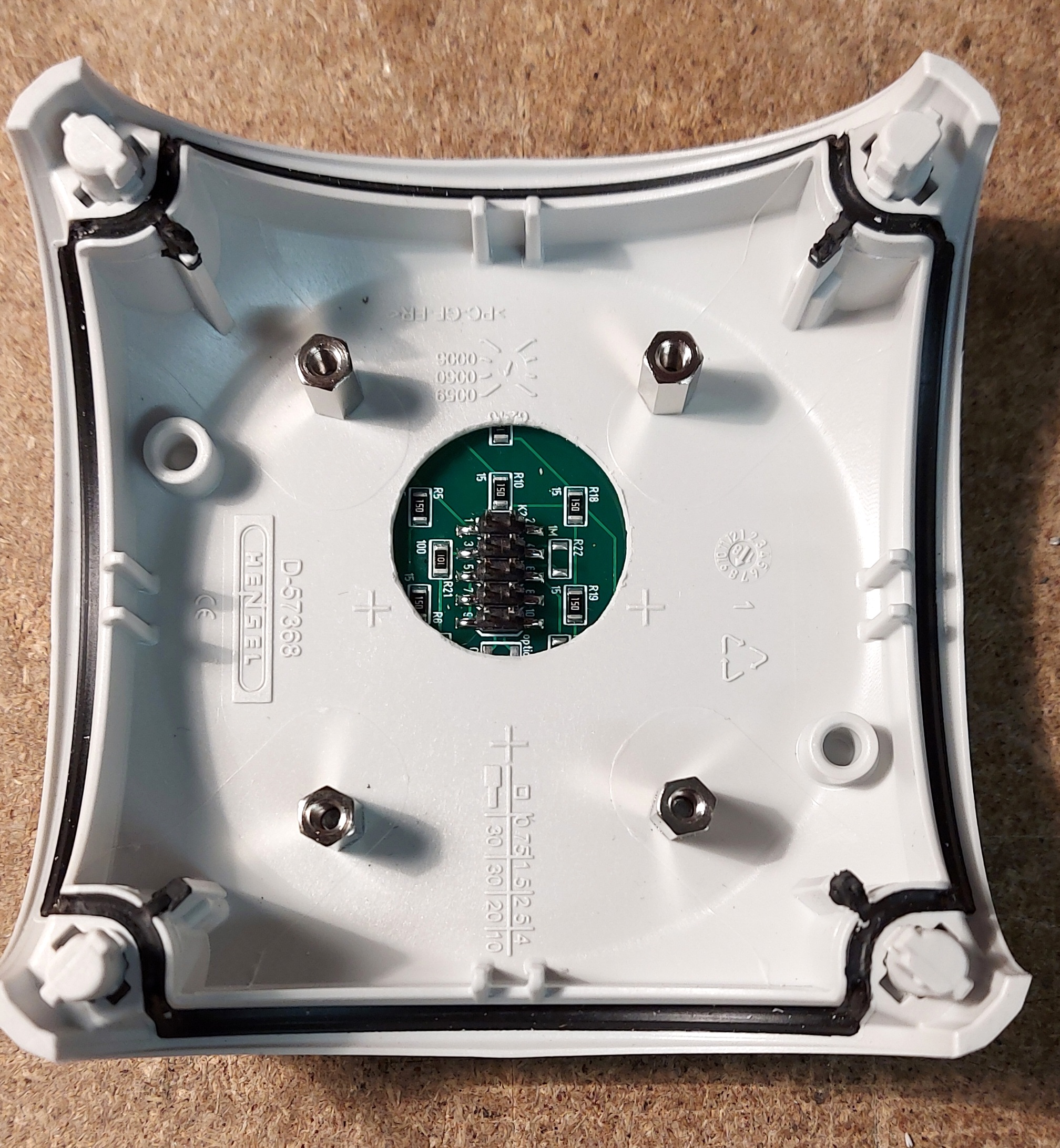
Das Modul lässt sich leicht in eine Hensel Verteilerdose (ohne Klemmen) mit den Abmessungen 104 mm x 104 mm, vom Typ DK 0200 G / IP66 einbauen.
Hinweis:
Die oben genannte Abzweigdose besitzt keine Einführungen oder Würgenippel. Die Einführungsöffnungen sind mit einer Gummimembrane ausgestattet, die leicht durchstochen werden kann und das Kabel anschließend wieder Wasserdicht umschließt.
Im ersten Schritt werden die Befestigungslöcher für vier Distanzhülsen M3x8mm auf der Deckel Oberseite angezeichnet und mit einem 3,2mm Bohrer gebohrt.
Dann werden die Löcher mit einem Senker soweit angesenkt, dass die M3x4mm Senkkopfschrauben plan in den Senkungen verschwinden.
Anschließend wird mit einem Fräser oder einem Forstner Bohrer ein ca. 25 mm großes Loch für den Sensorstecker und den DS18B20 Sensor ausgemessen und gebohrt.
Nun werden die Distanzhülsen M3x6mm auf der Innenseite des Deckels befestigt und die Auswerteeinheit so montiert, dass die Buchsen Leiste und der Sensor im Sensorbohrloch platziert sind.
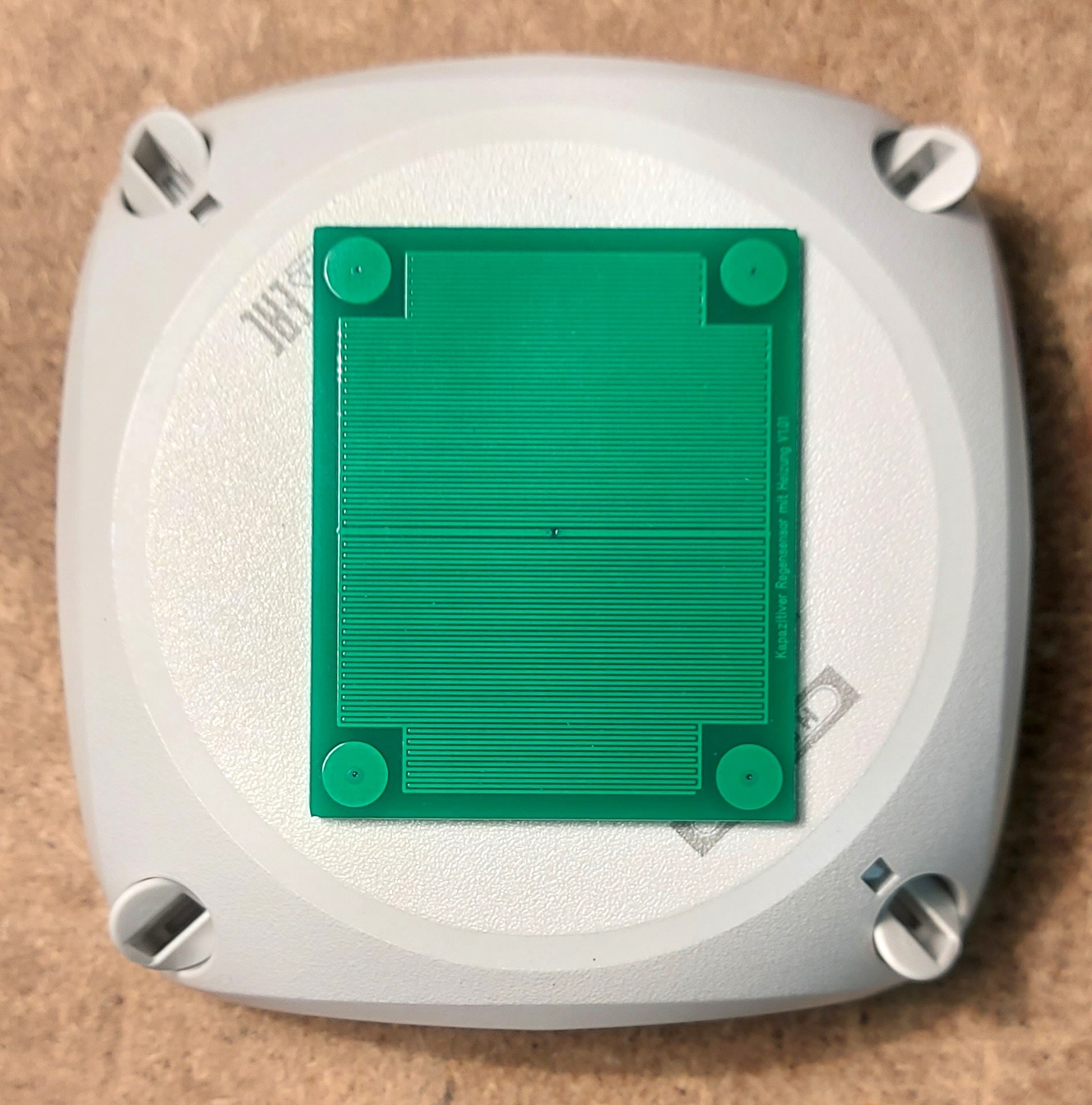
Danach kann der Sensor mit Silikon auf den Deckel aufgeklebt werden.
Achten sie beim Aufbringen des Sensors darauf, dass die Stiftleiste richtig in der zehn Poligen Buchsen Leiste steckt, so dass nach dem aufbringen der Sensorplatine auch alle vier Senkkopfschrauben verdeckt werden.
Versionsverlauf:
Info:
Projekt Weiterentwicklung für HV1 wurde mit der letzten Firmware Version V1.21 eingestellt.
Weiterentwicklung erfolgt nun auf der neuen Hardware Plattform HV2.
Mit optionaler Lux-, Wind- und Regenwippen Messung.
Released:
Version 1.21
Die Verarbeitung der Webserverausgaben wurde komplett überarbeitet. Zusätzlich wurde die Möglichkeit geschaffen, die Kommunikation mit dem MQTT-Broker nun auch über einen TSL Fingerprint verschlüsselt zu übertragen.An dieser Stelle nochmal vielen Dank an Wolfgang, der mich hierbei fantastisch unterstützt hat!
Version 1.20
Source Code wurde komplett überarbeitet.
Neuses Landingportal, verbesserte Chart darstellung, dynamische Werteanzeige ohne neuladen der Seiten.
Verbesserung der Regenmengenberechnung.
09.10.2023 Version 1.13
– HTML Code verbessert
07.08.2023 Version 1.12
– Fehlerhafte Windwerte größer 300 Km/h ausgeblendet.
09.03.2023 Alle HW Versionen
Firmware Version 1.11
– Überwachung der Regensensor Funktion „SensorStatus“ verbessert. MQTT-Struktur neu angelegt, der führende „/“ wurde entfernt!. Wichtiger Hinweis:
Bitte beachten, dass da durch ein neuer Eintrag im Broker erzeut wird!!!
20.10.2022 Alle HW Versionen
Firmware Version 1.10
– Überwachung der Regensensor Funktion „SensorStatus“ hinzugefügt.
23.08.2022 Alle HW Versionen
Firmware Version 1.09
– Fehler bei der Uptime behoben und Uptime Library eingebunden.
– Webserver Port in MQTT/Info eingefügt.
– Genauigkeit bei Chart und der Durchschnittlichen Regenmenge verbessert.
– Anzeige der Core VDD im Web Frontend.
29.07.2022 Alle HW Versionen
Firmware Version 1.08
Anzeige MQTT/Info/Port des Webservers.
Wird das Webserver Kennwort leer gelassen, erscheint kein Anmeldedialog im Webbrowser.
Fehlerbeseitigung Überlauf bei der Uptime Anzeige.
15.07.2022 Alle HW Versionen
Firmware Version 1.08
Erweiterung der Parametrierung für die Textausgabe des Regenstatus.
Erweiterung WIFI-Manager, um den Regensensor mit einem Port forwarding im Router auch aus dem Internet erreichen zu können, kann nun der Webserver Port frei konfiguriert werden.
Zusätzlich wird nun ein Anmeldename und ein Kennwort beim Aufrufen der Webseite abgefragt, um die Sicherheit zu erhöhen.
25.04.2022 Alle HW Versionen
Firmware Version 1.07
Aktualisierung der Arduino Librarys, neues Anmeldeportal.
04.02.2022 Alle HW Versionen
Firmware Version 1.06
Optimierung bei der Übertragung der MQTT Daten. Updates bei der Genauigkeit der Messwerte verbessert.
28.08.2021 Alle HW Versionen
Firmware Version 1.05
Integration eines Anemometers zur Ermittlung der Windgeschwindigkeit.
Precipitation Wert (Experimentelle Niederschlagsmenge) Errechnung über Viertelstunden Mittelwerte der Comp. Kapazität in l/m2, in MQTT und im Web Browser eingerichtet. Niederschlags Chart Demo Version 24h.
LWT / Alive – Last Will Testament Onlinestatus des Sensormoduls in MQTT integriert. Reduzierung des MQTT Datenverkehrs.
29.07.2021 Alle HW Versionen
Firmware Version 1.04
– Sensor Temperatursteuerung, Regelung der Leistung per PWM
und Option zur Begrenzung der maximalen Heizleistung.
– Temperaturregelung der Sensorheizung für Frostschutz und
Maximaltemperatur.
– Betauungsschutzfunktion ab einer Kompensierten
Sensorkapazität von 5 PF, Heizleistung Sensorheizung auf 20%
16.07.2021: Alle HW Versionen
Firmware Version 1.03
– Überarbeitung im Dialog Update, Reset und Restart im
Web Frontend vorgenommen.
– Regen Status als Klartextausgabe.
03.07.2021: Alle HW Versionen
Firmware Version 1.02
– Anzeige im MQTT – Broker erweitert.
04.06.2021: Alle HW Versionen
Firmware Version 1.01
– In dieser Version wurde eine Fehlerbeseitigung im
Web Frontend vorgenommen, es betrifft die Umschaltung
der Wirkrichtung des potentialfreien Relais Ausgangs.
Technische Beschreibung Controlino Sensorslot Modul
322 Downloads
Controllino Sensorslot Beispiel
236 Downloads
Allgemeines
Die SPS Module mit der Bezeichnung „CONTROLLINO“ sind frei programmierbare Arduino™ Standard und Arduino™ Software kompatible SPS Steuerung für den privaten und industriellen Gebrauch nach Norm EN 61010-2-201.
Der CONTROLLINO dient als elektronische Steuereinheit und ist auf ein Maximum an Kompatibilität ausgelegt.
Das Gerät verfügt nicht nur über alle gängigen Anschlüsse, sondern kann auch komplett von Grund auf programmiert werden.
Das CONTROLLINO kann auf Basis der Arduino™ IDE in der Programmiersprache C programmiert werden. Hierbei handelt es sich um eine Open Source Entwicklungsumgebung.
Zudem gibt es sehr viele Bibliotheken die das Programmieren vereinfachen.
Viele der angebotenen CONTROLLINO Module besitzen zu den bereits vorhandenen Klemmanschlüssen zusätzliche Pinheader Anschlüsse, die als 36-pol. Wannensteckerleisten ausgeführt sind und somit alle relevanten Anschlüsse des Microkontrollers als TTL-Kompatible Anschlüsse zur Verfügung stellen.
Die auf diesen Steckerleisten herausgeführten I/O’s besitzen einen ESD-Schutz und befinden sich hinter dem aktivem Spannungsteiler des CONTROLLINO und sind deshalb 5V TTL kompatibel, was eine Grundvoraussetzung für die Anbindung von Erweiterungen ist.
Genau hier setzt das „CONTROLLINOSensorslot Modul 1-Wire“ an.
Um weitere externe Sensoren wie z.B. 1-Wire Temperatursensoeren oder Eingänge an die Controllino SPS’en anschließen zu können, wurde dieses Modul entwickelt. Es erlaubt den Anschluß von bis zu acht exteren 5V kompatiblen Eingängen, die über den X1-Pinheader Anschluss des Controllino herausgeführt sind.
Werden 1-Wire Sensoren angeschlossen, können diese über eine entsprechende DIP-Schalter Einstellung dem A0-Eingang des Controllino zugewiesen werden.
Die Zuschaltung eines exteren Pull-Up Widerstandes und die Auswahl des Widerstandswertes ist eben so über einen DIP-Codierschalter möglich.
Alle übrigen Eingangänge, die nicht für den Anschluss von 1-Wire Sensoren ausgewählt wurden, stehen weiterhin als 5V Digital- Analogeingänge zur Verfügung.
Key Features
Die Spannungsversorgung erfolgt direkt über den Systembus des CONTROLLINO
Selbstrückstellende Sicherung zum Schutz des angeschlossenen CONTROLLINO
Anschluss von bis zu acht 1-Wire Sensoren
Flexibel durch diverse Bestückungs- und Anschlussvarianten (Wannenstecker oder Schraubklemmen)
Power LED für eine erleichterte Fehlersuche
Konfiguration der Sensoranschlüsse und des Pull-Up Widerstands über DIP-Schalter
Überspannungsschutz für jeden Sensorslot
Kurzschlussfeste 5V Sensorversorgung für jeden Sensorslot
Einfacher Anschluss an das CONTROLLINO Modul durch eine Flachbandkabelsteckverbindung
Mehrfachnutzung des Pinheaders möglich durch Anschluss eines Flachbandkabels mit mehreren Buchsenstecker.
Einfache Hutschienen Montage durch Hutschienen Railgehäuse
Für die Erfassung und Verteilung aktueller lokaler Wetterdaten wurde im Zuge eines Kundenauftrags diese IoT-Wetterstation mit integrierter Ethernet Schnittstelle auf Basis eines ESP32 entwickelt.
Alternativ kann auch auf die Anbindung über die Ethernet Schnittstelle verzichtet werden und die Daten könnten stattdessen per WLAN Verbindung über den Mikrokontroller ESP32 versendet werden.
Sie erfasst die folgenden Wetterdaten und sendet diese zyklisch per UDP-Broadcast über den Port 8888 in das lokale Netzwerk. Auch hier wäre der Versand per MQTT an einen Broker denkbar.
Wetterdaten:
Aktuelle Windgeschwindigkeit
Aktuelle Windrichtung (0 – 360 °)
Windrichtungswert als Windrichtungsindex
Aktuelle Außen- und Modultemperatur
Aktuelle Daten vom Kapazitiven Regensensor
Aktuellen LUX Wert, RAW Index und den Weiß Wert.
Regen Bit der Regenerkennung
Dämmerungsbit der Dämmerungserkennung
Windmax Bit der Windmax. Erkennung
Hardwareaufbau
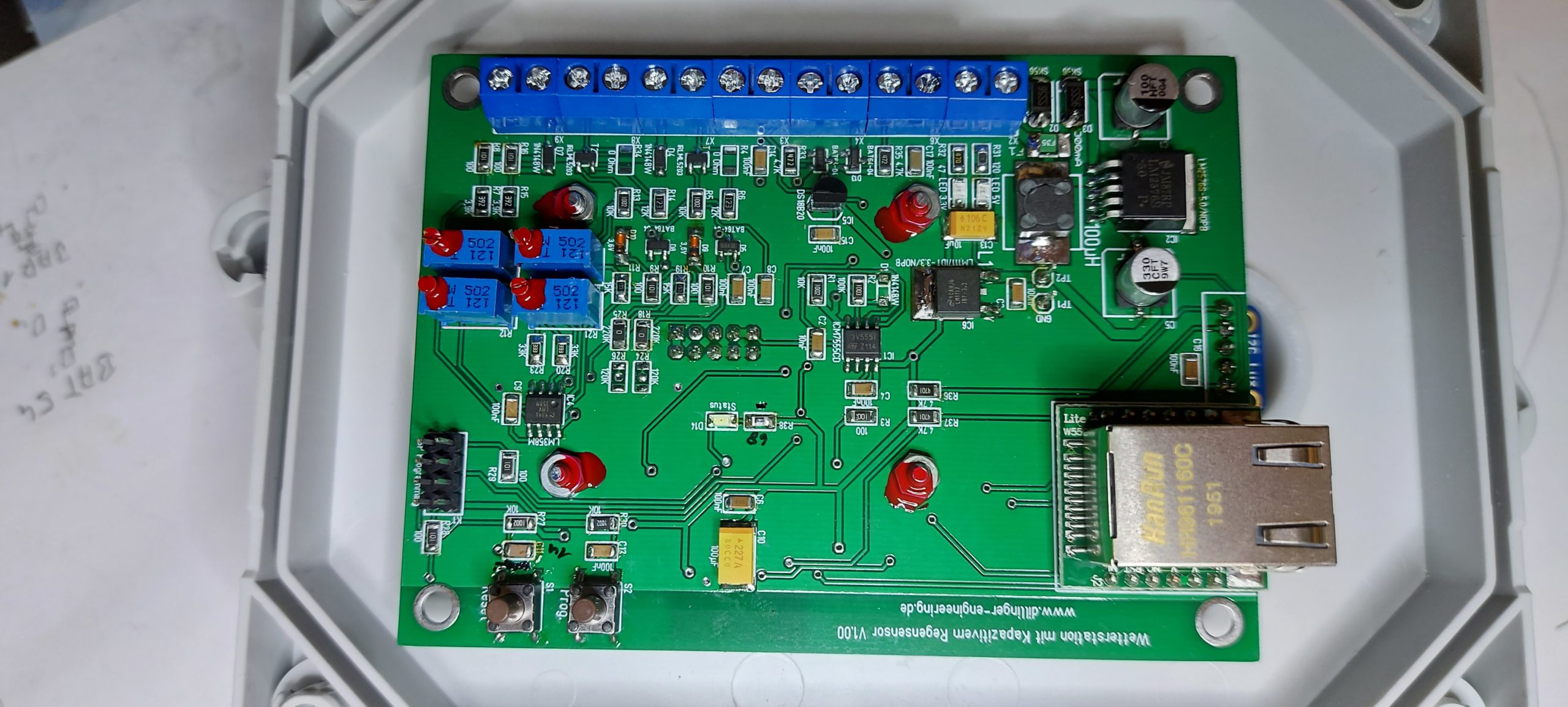
Die Platine der Wetterstation hat eine Abmessung von 80 x 120 mm.
Sie besitzt Schraubklemmen zum Verbinden der Eingangssignale und eine RJ45 Buchse zum Anschluss der Netzwerkverbindung über Ethernet, unten rechts im Bild.
IoT-Wetterstation PlatineIoT-Wetterstation Lux- und Kapazitiver Regensensor
Die Platine der verfügt über folgende Anschlüsse:
Einen Programmieranschluss für Firmware Updates
Einen RJ45 Netzwerkanschluss
Schraubanschlüsse für die Sensoren
Die ersten beiden Klemmanschlüsse dienen dem Anschluss der Versorgungsspannung, diese kann in einem Bereich von 7 – 27 V= liegen.
Der nächste Anschluss wurde für einen potentialfreien Eingangskontakt vorgesehen, an den z.B. ein Regenmengenmesser mit Read Kontakt angeschlossen werden könnte (optional).
Der nächste Klemmenblock stellen zwei stabilisierte Ausgangsspannung 3.3V und 5.0 V zur Verfügung. Hiermit können Beispielsweise externe Sensoren mit Spannung versorgt werden. Die nächsten beiden Klemmen GND und 1-Wire dienen zum Anschluss von externen 1-Wire Sensoren. In diesem Projekt wird hierrüber Außentemperatur mit einem 1-Wire Sensors vom Typ DS18B20 gemessen.
Die Letzten Klemmen sind Anschlussklemmen für zwei analogen Eingangskanäle. Diese könne je nach Bedarf wahlweise 0 – 10 V oder 0 – 20 mA Eingangssignale verarbeiten.
Am ersten Analogeingang U-in1 und GND kann z.B. der Sensor zur Messung der Windgeschwindigkeit und am zweiten Analogeingang U-in2 und GND der Sensor für die Windrichtung angeschlossen werden.
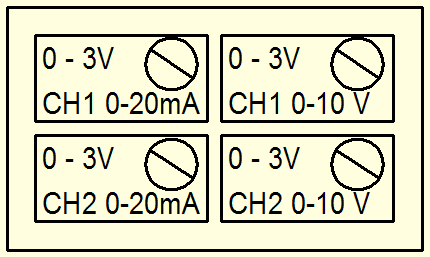
Eine Kalibration der Messbereiche für die beiden Analogeneingänge U-in / I-in, erfolgt für jeden Kanal getrennt, mit je zwei Spindelpotentiometer.
Hierbei wird zuerst der Spannungseingang abgeglichen und das entsprechende Spindelpotentiometer zunächst gegen den Uhrzeiger auf seine linke Endposition gestellt.
Nach dem Anlegen einer Spannung von 10.0 V wird das Spindelpotentiometer solange verstellt, bis am entsprechenden Ausgangspin, Kanal 1 = Pin1 und Kanal 2 = Pin 7, des LM358 eine Ausgangsspannung von 3.0 V gemessen wird.
Anschließend wird der Spannungseingang getrennt und derselbe Vorgang mit dem Stromeingang durchgeführt. So können beide Eingangskanäle auf ihren Endbereich kalibriert werden.
Kanal 1:
I – Abgleich 3.0V = 20 mA, CH1 Pin1 am LM358M
U – Abgleich 3.0V = 10 V, CH1 Pin1 am LM358M
Kanal 2:
I – Abgleich 3.0V = 20 mA, CH2 Pin 7 am LM358M
U – Abgleich 3.0V = 10 V, CH2 Pin 7 am LM358M
Alle Eingänge der Wetterstation sind gegen ESD geschützt, Die beiden Analogeingänge haben zusätzlich noch einen Verpolungsschutz und eine Einganswert Limitierung um bei einem zu hohen Spannungs- bzw. Stromwerts am Eingang den Mikrokontroller nicht zu zerstören.
Der Regensensor basiert auf einer Kapazitätsmessung.
Die ermittelte Kapazität wird über einen NE555 in ein digitales Frequenzsignal gewandelt und an den Mikrokontroller weitergeleitet, der dann die Berechnung und Auswertung übernimmt.
Es sind zwei Temperaturmessung vorhanden, die über den 1-Wire Bus erfasst und ausgewertet werden. Als Sensoren werden DS18B20 eingesetzt, der erste befindet sich direkt auf der Platine als TO-3 und dient zur Ermittlung der Gehäuseinnentemperatur, der zweite Sensor ist ein Wasserdichter Edelstahlsensor der in drei Leiter Technik über die Klemmen des 1-Wire Eingangs angeschlossen ist und die Außentemperatur misst.
Zur Erfassung des LUX, RAW und Weißwerts wurde eine VEML7700 des Hersteller Vishay verbaut. Dieser ist über eine I2C Schnittstelle an den Mikrokontroller angebunden und kann mit einer entsprechenden Parametrierung Lux Werte bis zu 150 Klx genau messen.
Das Herzstück der Schaltung ist ein ESP32 Mikrokontroller mit 4 MB Flashspeicher der Firma Espressif. Dieser Kontroller verfügt über ein WLAN und Bluetooth Radio, das jedoch in diesem Projekt nicht zum Einsatz kommt, da der Datenaustausch über Ethernet erfolgt.
Als Schnittstelle zum Ethernet ist ein USR-ES01 Modul mit W5500 Chipsatz vorhanden, die Anbindung an den Mikrokontroller erfolgt per SPI-Bus.
Die Spannungsversorgung für die Wetterstation könnte z.B. auch direkt über das Netzwerkkabel, per Power Over Ethernet kurz PoE erfolgen. Hierfür könnte ein PoE-Splitter, der eine stabilisierte Gleichspannung von 12V aus dem Signalkabel ausschleust, in das Gehäuse der Wetterstation eingebracht werden. Auf diese Weise könnte dann auch die Spannungsversorgung für den Wind- und Windrichtungssensor erfolgen.
Firmware Update
Um ein neues Firmware Update in den ESP32 Mikrokontroller zu laden, verfügt die Platine über einen zweireihigen, acht poligen Steckverbinder, an den der passende USB-Programmieradapter angesteckt werden kann, um eine neue Firmware in den Mikrokontroller der Wetterstation zu übertragen.
Bei einer Verbindung per WLAN, könnte ein Update aber auch per OTA (Over the air) erfolgen. Diese Option seht leider bei einer Anbindung per Ethernet nicht zur Verfügung.
Der USB-Programmieradapter muss dabei so aufgesteckt werden, dass er von der Grundplatine weg zeigt. Ein Vertauschen oder falsches aufstecken führt zur sofortigen Zerstörung der Wetterstation!
Das Herunterladen einer neuen Firmware darf deshalb nur von einer entsprechend eingewiesenen Person oder einem Fachmann durchgeführt werden!
Für den Programmiervorgang muss die Spannungsversorgung zur Wetterstation unterbrochen sein und die Netzwerkverbindung getrennt werden! Des Weiteren kann es beim Flashvorgang zu Problemen kommen, wenn an den analogen Eingangskanälen noch Sensoren angeklemmt sind. Deshalb wird auch hier empfohlen dies vor dem Flashvorgang zu entfernen!
Diese Druckmessplatine eignet sich hervorragend für die Messung verschiedener Medien und Duckmessbereiche, durch ihre flexible Konfigurierbarkeit ist sie für die verschiedensten Aufgaben im Bereich der Druckmessung einsetzbar.
Für verschiedene Druckmessbereiche stehn eine ganze Reihe verschiedener Drucksensors zur Verfügung.
Einsatz für Druckmessungen in verschiedenen Druckbereichen
Vielseitig einsetzbar
Weiter Eingangsspannungsbereich von 8 – 27V
Konfiguration aller Modulparameter direkt am Pressure Sensor Modul möglich
OLED-Display für die Anzeige der Messwerte und der Menüfunktionen
Bedienung über einen Drehwahlschalter oder einen Taster
Drei konfigurierbare potentialfreie Ausgangskontakte für das Über- und Unterschreiten einer einstellbaren Druckschwelle, sowie eines Sensorfehlers
Für jedes Relais kann die Ruhelage NO (normally open) oder NC (normally closed) separat festgelegt werden
Werte- und Fehleranzeige im Sensor Sensordisplay
Werte- und Fehleranzeige über die Blynk App und ein Web Interface zugänglich
Messwerte- und Statusmeldungen im Textformat über integrierte Micro USB-Schnittstelle (seriell Port)
Vielseitige auch für beliebige andere Druckmessaufgabe eingesetzt Messung
Zwei verschiedene Messmethoden, Messung des absoluten oder des relativen Drucks
Manuelle und automatische Kalibrierung bei der relativen Druckmessung
Spezielle Funktion für Druckschlauchmessungen, automatischen Differenzdruckabgleich
Teilbares System, dass aus einem wechselbaren Drucksensor, dem eigentlichen Auswertemodul
Menügeführte kundenspezifisch Sensoranpassung.
Aktualisierung der Firmware mittels OTA
Allgemeines
Die hier beschriebene Druckmessung entstand aus dem Projekt Timekeeper, dass auf Anfrage für eine Zeitmessung zu Trainingszwecke für eine Gleichmäßigkeitsprüfung durchgeführt wurde.
Als der Timekeeper beim Auftraggeber im Einsatz war, stellte sich heraus, dass das justieren der Lichtschranken gerade bei Sonnenschein eine mühselige Unterfangen darstellt.
Außerdem hängt die Genauigkeit der Erfassung hierbei auch immer von der Justierung der Lichtschranken ab. Da je nach Höhe und Winkel der Start- und Ziellichtschranke, diese bei verschieden Fahrzeugen unterschiedlich ausgelöst werden können. Diese Fehler bewegen sich zwar meist nur in Millisekunden Bereichen, können aber durchaus die Wertungsergebnisse beeinflussen.
So wurde die Idee geboren, einen alternative Messmethode zu testen. Es sollte eine Druckschlauchmessung aufgebaut werden, die quer über die Fahrbahn gelegt werden kann, umso eine Messmethode zu erhalten, die direkt an den Rädern des Fahrzeugs misst. Also Unabhängig von der Form und Bauart der Karosserie.
Es wurde ein PVC-Schlauch, der an einem Ende geschlossen war, an eine Handelsübliche Druckmessung angeschlossen und der Potentialfreie Ausgangskontakt mit dem entsprechenden Initiator Eingang des Timekeeper Moduls verbunden.
Die ersten Tests lieferten bereits sehr viel versprechend Ergebnisse und bewiesen, dass der grundsätzliche Testaufbau funktionierte.
Nach dem die ersten Erfahrungen mit verschiedene Schlauchmaterialien, Druckaufnehmer und den in der Praxis auftretenden Störeinflüssen gesammelt wurden. War schnell klar, dass eine handelsübliche Druckmessung die Anforderungen an diese Aufgabe nur bedingt erfüllen kann.
Der Nachteil eines solchen Messverfahrens ist eine vergleichsweise ungenaue Messung, da die Kunststoffschläuche ein gewisses Eigenleben haben, das zum Beispiel zu temperaturabhängigen Kriecheffekten und Offsetproblemen führt.
Es musste also eine speziell auf diese Art der Anwendung zuggeschnittene Lösung entwickelt werden.
Spezielle Funktion für die Schlauchdruckmessung
Das Hauptproblem stellt nicht die Messung an sich dar, sondern die Umgebungsbedingungen. Den der Druck im inneren des Schlauches ist natürlich in erster Linie abhängig von der Umgebungstemperatur.
Stellen wir uns folgendes vor, der Messaufbau wird am frühen Morgen installiert und getestet. Die Auslöseschwelle beim Überfahren des Schlauchs wird auf ein optimales Auslöseverhalten für die Art und Länge des Schlauchs programmiert.
Der Tag beginnt mit einem relativ kühlen Vormittag, entwickelt sich aber gegen die Mittagszeit zu einem sehr sonnigen Tag.
Am Nachmittag entstehen am Himmel größere vorbeiziehende Wolkenfelder.
So könnte ein normaler Sommer Tag aussehen … was passiert aber nun mit dem Druck im Sensorschlauch?
In der Früh wurde die Messung kalibriert und optimal eingestellt.
Am Vormittag steigt der Druck im Schlauchsensor jedoch stetig an. Im Extremfall sogar bis über die programmierte Auslöseschwelle.
Am Nachmittag wechselt der Druck im Schlauch im Verhältnis der vorbeiziehenden Wolkenfelder hin und her.
All dies hat Einfluss auf das Auslöseverhalten und die Genauigkeit der Messung und kann sogar zu Fehlauslösungen führen.
Genau für diesen Anwendungsfall wurde eine spezielle Zusatzfunktion in diese Druckmessung integriert.
Diese überwacht ständig den Druck im Sensorschlauch, steigt bzw. fällt der Druck (Delta P) über- oder unter einen programmierbaren Schwellwert und bleibt für eine definierbare Zeit (t) außerhalb der definierten Grenze, wird eine (AC) automatische Nullpunkt Kalibration des Relativdruckwertes durchgeführt.
Aufgabenstellung:
Es sollte eine Druckmessung mit einem weiten Eingangsspannungsbereich von 8 – 27V entwickelt werden.
Damit ein Betrieb mit einem Bleiakku (12V KFZ-Batterie), einem externen Netzteil oder eine direkte Versorgung aus dem Timekeeper Modul möglich ist. Dieser wird üblicherweise mit 24V gespeist.
Die Konfiguration der Modulparameter sollte direkt am Pressure Sensor Modul möglich sein. Für die Anzeige sollte ein kleines OLED-Display für die Anzeige der Messwerte und der Menüfunktionen vorhanden sein. Die Bedienung erfolgt dabei über einen Drehwahlschalter bzw. alternativ über einen Taster, der die Navigation und Auswahl der Menü Punkte erlaubt.
Das Modul sollte über drei konfigurierbare, potentialfreie Ausgangskontakte verfügen. Welche das Über- und Unterschreiten einer einstellbaren Druckschwelle, sowie einen Sensorfehler ausgeben können. Für jedes dieser drei Relais kann die Ruhelage NO (normally open) oder NC (normally closed) separat festgelegt werden.
Optional zur Werte- und Fehleranzeige am Sensor Modul, sollten diese Informationen auch über die Blynk App und ein Web Interface zugänglich sein.
Über die integrierte Micro USB-Schnittstelle sollen nach Aktivierung dieser Funktion im Menu, die Messwerte sowie die Statusmeldungen im Textformat ausgegeben werden. Damit diese für eine externe Weiterverarbeitung genutzt werden können.
Bei der Entwicklung der Messung sollte Wert daraufgelegt werden, dass diese sehr vielseitig, auch für beliebige andere Druckmessaufgabe eingesetzt werden kann.
Es sollen zwei verschiedene Messarten möglich sein, Messung des Absoluten Drucks sowie die Messung des Relativen Drucks.
Die Messung des Relativen Drucks sollte auch manuell Kalibriert werden können.
Für den Einsatz in Verbindung mit einer Druckschlauchmessung, muss eine spezielle Funktion implementiert werden, die bei Bedarf einen automatischen Differenzdruckabgleich durchführen kann. Dieser soll immer dann durchgeführt werden, wenn der Druck einen definierbaren Schwellwert (P) für eine definierbare Zeit (t) über- bzw. unterschreitet.
Das Pressure Sensor Modul sollte ein Teilbares System werden, das aus einem wechselbaren Drucksensor, dem eigentlichen Auswertemodul und einem schnell wechselbaren Schlauchsystem besteht.
Auf diese Weis ist es leicht möglich das Sensorsystem je nach Anforderung kundenspezifisch anzupassen.
In einem weiterer Entwicklungsschritt, soll die Firmware um eine eigenständige Zeitnahme Funktionalität erweitert werden.
Die Zeitmessung beginnt mit dem ersten Überfahren des Schlauchsensors und endet mit dem zweiten Überfahren.
Damit die Zeitmessung nicht sofort nach dem Überfahren mir den Hinterreifen wieder beendet wird, soll eine Verzögerungszeit zwischen der Start- und Endzeiterfassung eingegeben werden können, um dies zu verhindern.
Der Drucksensor:
Der verwendete Drucksensor ist ein analog arbeitender Sensor.
Er besitzt ein robustes Edelstahlgehäuse in dem sich ein präziser Druckkeramiksensor befindet. Die Vorverarbeitung des Messwerts übernimmt ein integrierter Mikrocontroller.
Der Sensor besitzt eine lange Lebensdauer bei einer geringen Langzeitdrift.
Die Verbindung zur Auswerteelektronik wird über eine dreipolige wasserdichte PACK-Steckverbindung hergestellt.
Die Versorgungsspannung des Sensors beträgt 5V ± 0,25V
Die Sensoren gibt es mit verschiedenen Druchmessbereichen, die jeweils im Menü des Pressure Sensors ausgewählt werden können.
Weiter Infos zu den Sensoren finden Sie in der ZIP-Datei.
Der Analogausgang arbeitet in einem Spannungsbereich von 0,5V – 4,5V linear zum Skalendruck. Der Zerstörungsdruck liegt beim 3-fachen Skalendruck.
Da der Sensorwert über ein Analogsignal im Bereich von 0,5V – 4,5V übertragen wird, ist es leicht möglich, beim einem Über- bzw. Unterschreiten dieser Werte, eine Drahtbruch bzw. Kurzschluss Auswertung vorzunehmen.
Farbcode der Sensoranschlussdrähte:
Analogausgang 0,5-4,5V Grün
+5V (VDD) Schwarz
Masse (GND) Rot
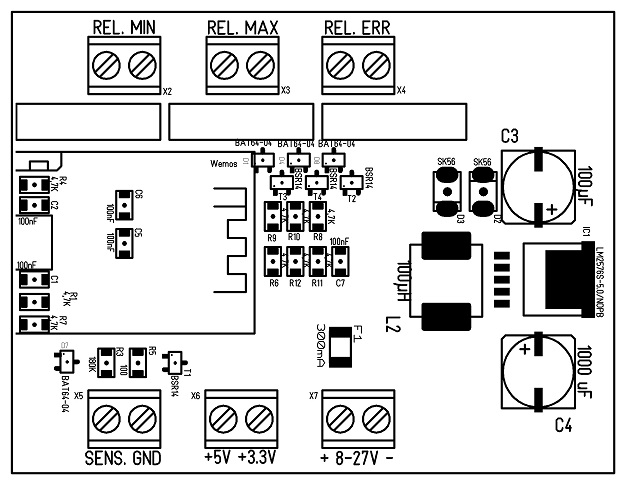
Anschlussbelegung Hardware
Anschlussbelegung V1.00
REL. MIN Potentialfreier Kontakt für eine min. Druck
REL. MAX Potentialfreier Kontakt für eine max. Druck
REL. ERR Potentialfreier Kontakt für eine Sensorstörung
SENS. Sensor analog Eingang max. 0-5V
GND Ground (Minus)
+5V Spannungsversorgung 5V Sensor
+3,3V Spannungsversorgung 3,3V Sensor
+8-27V- Spannungsversorgung Pressure Sensor Modul
Versionsverlauf:
Intended:
Nichts in Planung
Released:
03.05.2021: Version X.01 (für alle Hardware Versionen)
– Ergebnisliste im Webserver
– Ergebnistabelle im Webserver als CSV exportierbar
– Anzeige der Ergebnisse in der Blynk App.
– Konfiguration verschiedener Drucksensoren von 5 psi – 200 psi
15.12.2020: Version 1.00
– Druckmessung relativ / absolut
– Autocalibration
– Sensorfehlererkennung Relaisausgang NC/NO
– Seriale Ausgabe der Werte über USB,
– Min/Max Wert Relaisausgänge NC/NO
– Webbrowser Darstellung
– Blynk Applikation
Im Internet wird eine Vielzahl von verschiedenen Regensensoren angeboten. Die meisten davon kommen aus Fernost und arbeiten nach dem Resistance Prinzip.
Trifft ein Regentropfen auf die nicht isolierten Kontakte des Sensors, werden die nebeneinanderliegenden kammförmigen Kontakte durch den Regen verbunden, was letztendlich zu einer Reduzierung des Sensorwiderstandes führt.
Diese Widerstandsänderung ist abhängig vom Verschmutzungsgrad des Regenwassers, sowie der bereits eingetretenen Oxidation des Regensensors.
Über eine Komparator Schaltung kann hierbei meist der Schaltpegel eingestellt werden, bei dem Regen detektiert wird und der dann ein digitales Ausgangssignal setzt.
Manche Sensoren stellen zusätzlich zu diesem Digitalausgang noch ein Analogsignal zur Verfügung, was eine Lösung für eine zeitweilige Kalibrierung des Sensors durch die Software erlauben würde.
Das große Problem bei dieser Messmethode ist es, dass selbst bei Sensoren mit vergoldeten Kontaktoberflächen immer parasitäre Ströme fließen.
Da praktisch immer ein kleiner Gleichstrom an beiden Polen des Sensors anliegt, führt dies unabhängig von der Qualität des Sensors zu einem elektrochemischen Prozess und damit über kurz oder lang zu einer schrittweisen Zerstörung des Sensors.
Eine bessere Lösung stellt dieser Sensor dar, da er auf einem anderen Prinzip, dem kapazitiven Prinzip beruht.
Das Funktionsprinzip bei einem kapazitiven Sensor ist dem oben vorgestellten Messverfahren durchaus ähnlich. Es unterscheitet sich jedoch in einem wesentlichen Punkt, bei Regen wird hier keine leitende Verbindung hergestellt. Durch die Wassertropfen auf der Oberfläche wird lediglich die Kapazität des Sensors verändert, das Wasser wirkt als Dielektrikum.
Der Vorteil bei diesem Lösungsansatz liegt darin, dass keine blanken Leiterbahnoberflächen der Witterung ausgesetzt sind und dadurch auch kein elektrochemischer Prozess ausgelöst wird, der den Sensor auf Dauer irreversibel beschädigt. Alle leitenden Teile sind durch eine Lackschutzschicht vor Witterungseinflüssen geschützt.
Die Kapazität des Sensors beträgt im trockenen Zustand ca. 170pF. Tritt eine Betauung ein oder trifft Regen auf den Sensor, steigt die Kapazität an. Durch das ermittelte Delta C, lässt sich sogar eine Aussage über die Art des Regens und dessen Intensität treffen. Ist es Neblig oder es handelt sich um einen feinen Nieselregen, der die Sensoroberfläche benetzt, bilden sich viele kleine Wasser Tröpfchen auf dem Sensor, was wiederrum zu einem großen Delta C führt.
Bei einem Durchschnittlichen Regen Ereignis sind es vorwiegend größere Tropfen, die zu einem großen Teil sofort wieder abrutschen, so ergibt sich ein kleineres Delta C.
Um schnell festzustellen zu können, ob der Regen zu Ende ist, besitzt der Sensor eine Heizung an der Platinen Unterseite. Diese besteht aus zwanzig 15 Ohm Heizwiderstände, die es bei einer Versorgungsspannung von 5V immerhin auf eine Heizleistung von knapp 1,8 W bringen.
Sie sorgen für eine zügiges verdunsten der Flüssigkeit bzw. einer Eisbildung auf der Sensoroberfläche.
Durch die sehr kleine Bauform des Sensors, kann selbst mit dieser relativ geringen Leistung ein schnelles (ca. 5 Minütiges) Abtrocknen sichergestellt werden.
Energetisch gesehen ist es sinnvoll, die Sensorheizung nur für die Dauer einer Regenerkennung zu betreiben. Das bedeutet, wird keine Feuchtigkeit oder Regen mehr detektiert, soll die Sensorheizung abgeschaltet werden!
Hierfür ist ein Transistor auf der Sensorplatine vorgesehen.
Wird hier ein Mosfet bestückt und ist der Pin in dieser Hardware Version 1.00 für dessen Ansteuerung nicht angeschlossen, muss dieser auf Masse gelegt werden.
Da der Mosfet bei einem offenem Gate in einem Halbleitenden Zustand gehen könnte, was zur einer Zerstörung des Bauteils führen würde.
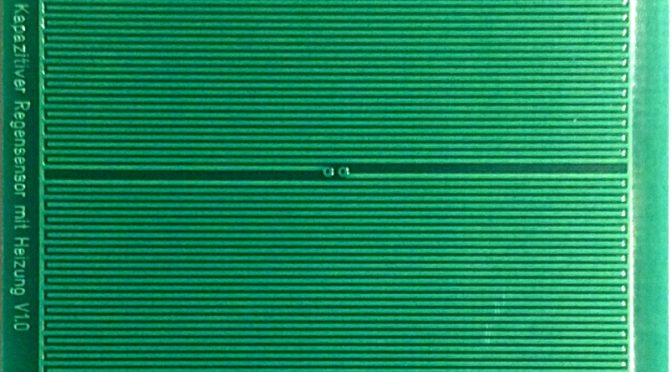
Diese Bild zeigt die Bestückung der Unterseite des Sensors. Es ist gut zu erkennen, das im Layout zwar Pats für eine Befestigung der Sensorplatine vorgesehen sind, diese jedoch keine Bohrung besitzen. Weshalb hier auch kurz auf die Befestigung des Sensors eingegangen werden soll.
Wie zu sehen ist befinden sich die Anschlüsse annähernd mittig auf der Sensorplatine.
Verwandt man z.B. eine feste wasserdichte Hensel Anschlussdose um die Elektronik darin zu verstauen, genügt es in den Deckel ein passendes rundes Loch zu bohren, damit die Anschlüsse nach innen geleitet werden können. Der Regensensor selbst wird am besten mit Silikon wasserdicht mit dem Deckel verklebt.
Sollten dennoch Befestigungslöcher benötigt werden, so können diese nachträglich ausgebohrt werden.
Es bietet sich an die Platine für die Auswertung mit dem entsprechenden Gegenstück auszustatten, so dass diese von der Innenseite aufgesteckt werden kann.
Die Befestigung dieser Platine kann mit Distanzbolzen, die am Deckel eingeschraubt werden, erfolgen. Werden die Schrauben nicht vom Sensor (mit Silikon) überdeckt, sollte hier auf Edelstahlschrauben zurückgegriffen werden.
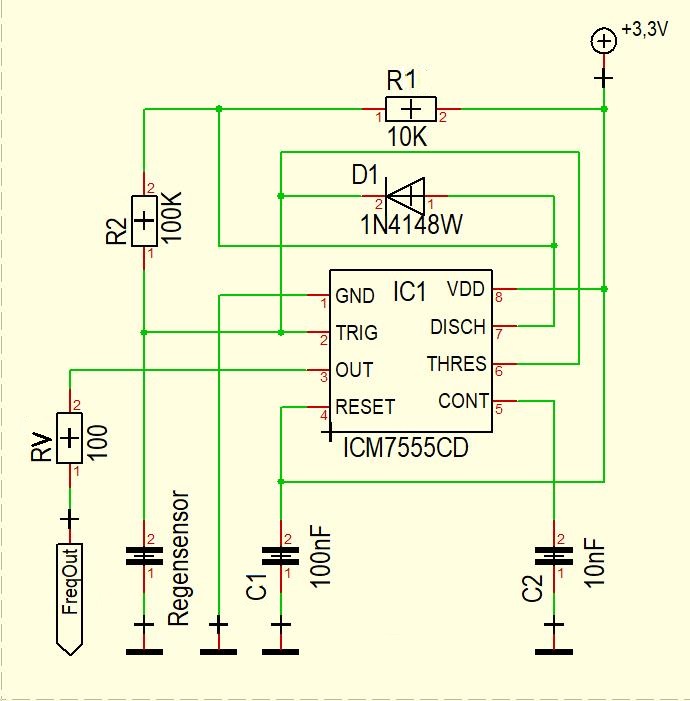
Im Unteren Bild ist der Schaltplan der Sensorplatine zu sehen.
Bei der Steckverbindung wurde wert daraufgelegt, dass die Signale für alle möglichen Anschlussvarianten an den Pins herausgeführt wurden.
Somit stehen dem Endanwender auch alle möglichen Messverfahren zur Verfügung, die zur Kapazitätsmessung angewandt werden können.
Kapazitiver Regensensor V1.01
Pin Belegung:
VDD +5V / 3,3V
NC
Sensorheizung
Ladewiderstand
Analog wert (Ladezustand)
Entladewiderstand
GND
GND
Kapazitätsmessung durch Laden- und Samplen der Kondensatorspannung
Die Platine des kapazitiven Regensensors wurde für verschieden Anwendungsbereiche entwickelt, deshalb gibt es auch verschieden Bestückungsvarianten.
Wenn man z.B. einen PIC Mikrokontroller mit einem Komperatoreingang verwnden, kann eine Messmethode angewendet werden, bei die Kapazität des Sensor über den Pin 6, R23 entladen wird (Pin auf LOW) und der Pin anschließend wieder als Komperator Eingang umgeschaltet wird.
Der Pin 4, der zu diesem Zeipunkt im Tristate (hochohmig) war, wird nun als Ausgang programmiert und auf LOW geschaltet. Dieser läd nun die die Kapazität des Regensensors über R22 auf, bis der Komperatoreingang kippt.
Die ermittelte Zeit dient dann als Grundlage für die Kapazitätsbestimmung.
Beim MQTT-Regensensormodul wird ein anderes Messvervahren angewannt, da dieser nicht über einen Komperatoreingang verfügt.
Hier wird der AOUT (der gegen GND direkt die Kapazität des Sensors dartellt) als Kapazität eines Multivibrators genutzt, der abhängig von dieser Kapazität seine Ausgangsfrequenz ändert. Diese Ausgangsfrequenz wird an einem digitalen Eingang des ESP8266 gemessen und die Sensorkapazität aus der Frequenz berrechnet.
Da für dieses Messverfahren der C1, R22 und R23 nicht benötigt werden, müssen diese Bauteile bei diesem Messverfahren nicht mit bestückt werden.
Das obengenannte Messverfahren, dass sich jedoch nur für größere Kapazitäten im Bereich zwischen 10 nF und 2000 uF eigent, beschreibt der folgende Source Code von von Matthias Busse
// Kapazität Messgerät 10nF bis 2000uF
//
// Matthias Busse 22.2.2015 Version 1.1
#define messPin 0 // Analog Messeingang
#define ladePin 13 // Kondensator lade Pin über einen 10kOhm Widerstand
#define entladePin 11 // Kondensator entlade Pin über einen 220 Ohm Widerstand
#define widerstand 9953.0F // 10 kOhm > gemessen 9,953 kOhm
unsigned long startZeit;
unsigned long vergangeneZeit;
float microFarad;
float nanoFarad;
void setup() {
pinMode(ladePin, OUTPUT); // ladePin als Ausgang
digitalWrite(ladePin, LOW);
Serial.begin(9600); // Serielle Ausgabe
Serial.println("Kapazitaetsmesser Version 1.1");
}
void loop() {
// Kondensator laden
digitalWrite(ladePin, HIGH); // ladePin auf 5V, das Laden beginnt
startZeit = micros(); // Startzeit merken
while(analogRead(messPin) < 648){} // 647 ist 63.2% von 1023 (5V)
vergangeneZeit= micros() - startZeit - 114; // 0-Messung abziehen (112-116 us)
if(vergangeneZeit > 4294960000) vergangeneZeit = 0; // Minuswerte auf 0 setzen (ist long deshalb der hohe Wert)
// Umrechnung: us zu Sekunden ( 10^-6 ) und Farad zu mikroFarad ( 10^6 ), netto 1
microFarad = ((float)vergangeneZeit / widerstand);
Serial.print(vergangeneZeit); // Zeit ausgeben
Serial.print(" nS ");
if (microFarad > 1){
if(microFarad < 100) {
Serial.print(microFarad,2); // uF.x ausgeben
Serial.println(" uF ");
}
else {
Serial.print((long)microFarad); // uF ausgeben
Serial.println(" uF ");
}
}
else {
nanoFarad = microFarad * 1000.0; // in nF umrechnen
if(nanoFarad > 10) {
Serial.print((long)nanoFarad); // nF ausgeben
Serial.println(" nF ");
}
else
Serial.println("kleiner 10 nF");
}
/* Kondensator entladen */
digitalWrite(ladePin, LOW); // ladePin auf 0V
pinMode(entladePin, OUTPUT); // entladePin wird Ausgang
digitalWrite(entladePin, LOW); // entladePin auf 0V
while(analogRead(messPin) > 0){} // bis der Kondensator entladen ist (0V)
pinMode(entladePin, INPUT); // entladePin wird Eingang
while((micros() - startZeit) < 500000){} // bis 500ms warten, d.h. max 2 Ausgaben pro Sekunde
}
Kapazitätsmessung sehr kleiner Kapazitäten
Da bei sehr kleien Kapazitäten die Ladezeit des Kondensators ebenfalls sehr klein wird, müsste beim oben vorgestellten Messverfahren der Ladewiederstand im Verhältnis hierzu entsprechend vergrößert werden, um mit der Samplingrate des AD-Wandlers im Mikrokontroller immer noch ein akzeptables Messergebnis erzielen zu können.
Das Problem bei einem sehr großen Ladekondensator liegt darin, dass natürlich auch der analoge Eingang des Mikrokontrollers den Kondensator belastet und entläd. Der Messfehler wird also umso größer, je größer der Ladewiderstand wird, bis das System am Ende kippt und der Ladewiderstand die benötigte Ladung nicht mehr liefern kann.
Da sich die Kapazität des Regensensors in einem Bereich von 170pF – max. 400 pF bewegt, wird hier für auf eine anderes Messverfahren zurückgegriffen werden.
Das Frequenzmessverfahren
Bei diesem Messverfahren wird keine ADC benötigt, es kommt mit einem Digitaleingang des Mikrokontrollers aus.
Hierfür kommt der hochgenaue Langzeittimer NE555 zum Einsatz.
Dieser Timer seht sowohl in einer 5V Variante als NE555, als auch für Mikrokontroller die nicht 5V tolerant in einer 3V Variante ICM7555 zur Verfügung.
Arbeitet der Mikrokontroller mit 3,3,V und stehen nur ein NE555 zur Verfügung, kann natürlich auch ein Spannungsteiler am Ausgang den Levelshift übernehmen.
Der NE555 wird in dieser Schaltung als Multivibrator eingesetzt, der abhängig von angeschlossenen Kondensator seine Ausgangsfrequenz verändert.
Wenn am Ausgang gleiche Ein- und Ausschaltzeiten erzeugt werden sollen, muss die Standardschaltung (siehe oben) mit einer Diode parallel zum Widerstand R2 aufgebaut werden. Andernfalls kann diese Diode einfach entfallen. In der obigen Bauteilauslegung ist das Tastverhältnis annähernd 1:1 was auch hier die Diode unnötig macht.
Im Programm des Regensensors werden beide Varianten berücksichtigt. Da sowohl die Zeitdauer der negativen als auch der positive Halbwelle gemessen und anschließend addiert werden. Und damit die ganze Periodendauer berechnet wird.
Für die Messung wird vom Regensensor nur der Pin 5 (Analogwert) und Pin 7 (GND) benötigt.
Soll die Heizung genutzt werden kommen noch der Pin 1 (VDD) und Pin 3 (Sensorheizung aktivieren) hinzu.
Die Ein- Zeit berechnet sich wie folgt: T1= 0,694 * (R1 + R2) * C
Die Aus- Zeit berechnet sich wie folgt: T2= 0,694 * R2 * C
Die gesamte Periodendauer ist die Summe aus T1 +T2 T = 0,694 * C * (R1 +(2 * R2)) f = 1 / T
Die Frequenz ist 1 / T1 + T2, damit ergibt sich die Ausgangsfrequenz nach folgender Formel: f = 1 / (0,694 * C * (R1 +2 * R2))
Da bei dieser Anwendung für uns nicht wichtig ist, welche Kapazität der Sensor hat, kann bereits die gemessene Frequenz für eine Regenauswertung verwendet werden.
Der Vollständigkeit halber hier trotzdem noch die kurz die nach C umgestellte Formel: C =1 / ( f * 0,694 * (R1 + 2 * R2))
Programaufbau für die Kapazitätsmessung des Regensensors
/* Capacitivemeasurement (c) by Dillinger-Engineering 10/2020
Funktionsweise:
Um die kleinen Kapazitätsveränderungen des Regensensors (pF-Bereich)
mit einer hohen Genauigkeit zu messen, wird hier ein NE555/3V verwendet.
Dieser arbeitet als Multivibrator mit einer Frequenz im KHz Bereich.
Ändert sich die Messkapazität, ändert (sinkt) auch die
Frequenz. Je nach Auslegeung der Schaltung kann über die
Frequenzänderung dann die entsprechende Kapazität errechent werden.
Je gröer der Parameter "MeasuringCycleleTime" gewählt wird,
um so genauer wird auch die Messung. Zu beachten ist dabei jedoch,
dass sich, sollte ein Sensor Fehler (kein Signal vom Eingang) vorliegt, damit
auch die Timeoutzeit entsprechnde verlängert !
*/
const byte InputPin = 5; // Wemos D1 mini (Pin D1)
const unsigned int MeasuringCycleleTime = 1e6; // 1000000 us
const long R1 = 10000; // 10 KOhm
const long R2 = 100000; // 100 KOhm
float GetFrequeny(){ // Ergebnis in Hz
float fsum = 0.0;
unsigned int counts = 0;
double f, T;
unsigned long SartTtime = micros();
bool Fail = false;
do {
T = pulseIn(InputPin, HIGH, MeasuringCycleleTime) + pulseIn(InputPin, LOW, MeasuringCycleleTime);
if(T==0){
Fail = true;
}
f=1/T;
counts++;
fsum += f * 1e6;
} while(micros() < (SartTtime + MeasuringCycleleTime) && !Fail); // 1 Sekunde mitteln
if(Fail){
return(0);
}else{
f = fsum / counts * 0.9925; //Korrekturwert ermitteln und einrechnen
return(f);
}
}
float GetCapacity(){ // Ergebnis in pF
return(1/(GetFrequeny() * 0.694 * (R1 + 2 * R2))* 1e12);
}
void setup() {
pinMode(InputPin, INPUT);
Serial.begin(115200);
}
void loop() {
char CharStr[30];
// Show Data on Serial if available
sprintf(CharStr,"Capacity: %.3f pf", GetCapacity());
Serial.println(String(CharStr));
sprintf(CharStr,"Frequenz: %.3f Hz", GetFrequeny());
Serial.println(String(CharStr));
}
Der ESP8266 verfügt je nach Bestückung des verwendeten ESP-Moduls über ein Flash Speicher, der von 512 Byte bis zu 16KByte reichen kann.
Beim ESP wird hiervon fester Bereich von 4096 Byte für eine „qasi“ EEProm reserviert, welches vom Programm gelesen und auch beschrieben werden kann. Diese Daten bleiben wie das Programm nach einem Neustart erhalten.
Die Größe dieses für den EEProm reservierten Bereichs ist in der spi_flash.h unter SPI_FLASH_SEC_SIZE (4096) definiert.
Quelle: www.ullisroboterseite.de
EEproms eignet sich perfekt zum speichern non Daten bzw. von Daten Strukturen, die nach einem Neustart des ESP wieder zur Verfügung stehen sollen.
Da es sich hierbei aber immer noch um eine Flash Ram handelt und diese vom Hersteller mit einer maximalen beschreibbarkeit von ca. 10.000 mal angegeben werden, sollten hier nur Daten gespeichert werden, die keiner häufigen oder gar zyklischen Änderung unterliegen.
Deshaln eignet sich dieser Speicher auch nicht für Messdaten, für Konfigurationsdaten, die sich aber nur selten ändern, ist er perfekt.
Verwendung
Die definition erfolgt als Arduino-typischer Klassenkonstruktor mit der Klasse EEPROMClass, diese stellt eine Reihe vordefinierter Funktionen bereit, die für das Handling mit dem EEProm notwendig sind.
Mit „void EEPROMClass::begin(size_t size)“ wird das Objekt zunächst initialisiert.
Dabei wird ein interner Puffer mit Namen _datain der angegeben Größe angelegt.
In diesen Bereich, der nun als EEPROM deklarierte ist, wird nun der Puffer eingelesen.
Alle nachfolgende Lese- bzw. Schreib Operationen in disem Zwischenpuffer.
Dieser Zwischenpuffer wird erst dann in den Flash Speicher übertragen, wenn man dies mit der Methode EEPROM.commit();anfordert oder das Programm die Operation mit einem EEPROM.end(); abschließt.
Die internen Variablen _dirty vermerkt, ob eine Änderung des Dateninhalts stattgefunden hat. Ein Zurückschreiben des Pufferinhalts erfolg deshalb nur dann, wenn auch eine Änderung stattgefunden hat.
Die Methode getDataPtr() liefert den Zeiger auf den internen Pufferspeicher. Bei einem Aufruf dieser Methode wird _dirty gesetzt, da der Pufferinhalt über diesen Zeiger abgeändert werden könnte.
Der Kalssenaufruf EEPROMClassbenötigt beim Konstruktor die Angabe der Speicheradresse (Sektornummer) in EEPROM.cpp, _SPIFFS_endergibt sich aus der in der IDE festgelegten SPIFFS-Konfiguration.
Die vordefinierte Instanz der Klasse EEPROM wir folgt angelegt:
Um z.B. Konfigurationsdaten in Verbindung mit dem EEPROM zu lesen und zu speichern, bietet es sich an die Daten in einer Structur zu verwalten.
typedef struct {
int PHysteresisH1 = 10; // Fall Back Hysteresis für Relais
int PThresholdH1 = 100; // Schwellwert für Relais
int PHysteresisL1 = 10; // Fall Back Hysteresis für Relais
int PThresholdL1 = 50; // Schwellwert für Relais
int PRelaisStateL1 = 0; // 0- NO / 1- NC
int PRelaisStateH1 = 0; // 0- NO / 1- NC
int PRelaisStateErr = 1; // 0- NO / 1- NC
int PSerialOutState = 0; // 0- OFF / 1- ON
int PWifiState = 0; // 0- OFF / 1- ON
int PMode = 0; // 0= relative / 1= Absolut Druck
int PACMode = 0; // 0= keine Autocalibration / 1= Autokalibration
int PDeltaAC = 10; // Maximale Abeichung Druckdifferenz
int PCalibrationTime = 5000; // Calibration Counter Time in ms
unsigned long PHoldTime = 500; // Für Abfallverzögerung in ms
} PSettings;
PSettings psettings;
Um Speicherplatz zu sparen, sollte der Pufferspeicher nicht größer als notwendig initialisiert werden. Die Maximale Größe beträgt 4096.
Lesen von Daten aus dem Pufferspeicher
EEPROM.begin(1024); // Puffergröße die verwendet werden soll
EEPROM.get(512, psettings); // Anfangsadresse bei der die definierte Structur abgelegt ist
EEPROM.end(); // schließen der EEPROM Operation
Schreiben von Daten in den Pufferspeicher und anschließende Übernahme in den Flash mit commit()
EEPROM.begin(1024);
EEPROM.put(0, settings); //Schreiben einer zweiten Structur ab Adresse 0
EEPROM.commit();
EEPROM.end();
Beim der Einbinden von ISR Routienen in den Quellcode des ESP kann es zu einer Fehlermeldung des Compilers kommen.
need to add the ICACHE_RAM_ATTR macro to interrup service routines (ISRs)
Das ICACHE_RAM_ATTR und ICACHE_FLASH_ATTR sind Linkerattribute. Bevor Sie Ihren Programmcode kompilieren, können Sie festlegen, ob die Funktion im RAM oder FLASH gespeichert werden soll (normalerweise legen Sie nichts fest: kein Cache).
Der ESP8266 ist Multitasking und der ESP32 verfügt über 2 Kerne. So können Sie Ihren Code als Multithreading ausführen, da er das RTOS verwendet.
Und jetzt das Problem: Der gesamte Flash wird für das Programm und die Speicherung verwendet. Das Lesen und Schreiben in den Flash kann aber nur über einen Thread erfolgen. Wenn Sie versuchen über 2 verschiedene Threads gleichzeitig auf den Flash zuzugreifen, kann es bei einem Konflikt zu abstürzen Ihres ESP kommen.
Sie können Ihre Funktion anstelle des Flashs, aber auch im RAM ablegen. Selbst wenn Sie etwas in das EEPROM oder den Flash schreiben, kann diese Funktion aufgerufen werden, ohne auf den Flash zuzugreifen.
Mit ICACHE_RAM_ATTR stellen Sie die Funktion in den RAM.
und
mit ICACHE_FLASH_ATTR stellen Sie die Funktion in den FLASH, z.B. um RAM zu sparen.
Interrupt-Funktionen sollten deshalb immer mit dem ICACHE_RAM_ATTR Linkerattribute versehen werden.
Funktionen, die häufig aufgerufen werden, sollten kein Cache-Attribut verwenden.
Wichtig:
Greifen Sie NIEMALS innerhalb eines Interrupts auf Ihren Flash Speicher zu!
Da der Interrupt jeder Zeit während eines Flash-Zugriffs auftreten kann.
Wenn Sie also gleichzeitig versuchen, auf den Flash zuzugreifen, kommt es zu einem Absturz und das kann manchmal auch erst nach einer lägerer Betriebszeit geschehen.
Da Sie nur 32 KB IRAM (Instruction RAM) haben, sollten Sie versuchen, nur Interrupt-Funktionen in den RAM zu stellen.
Nicht alle Ihre Funktionen, auch wenn dies mit Linkerattributen möglich ist.